第三章 用户界面
3.1 软件启动
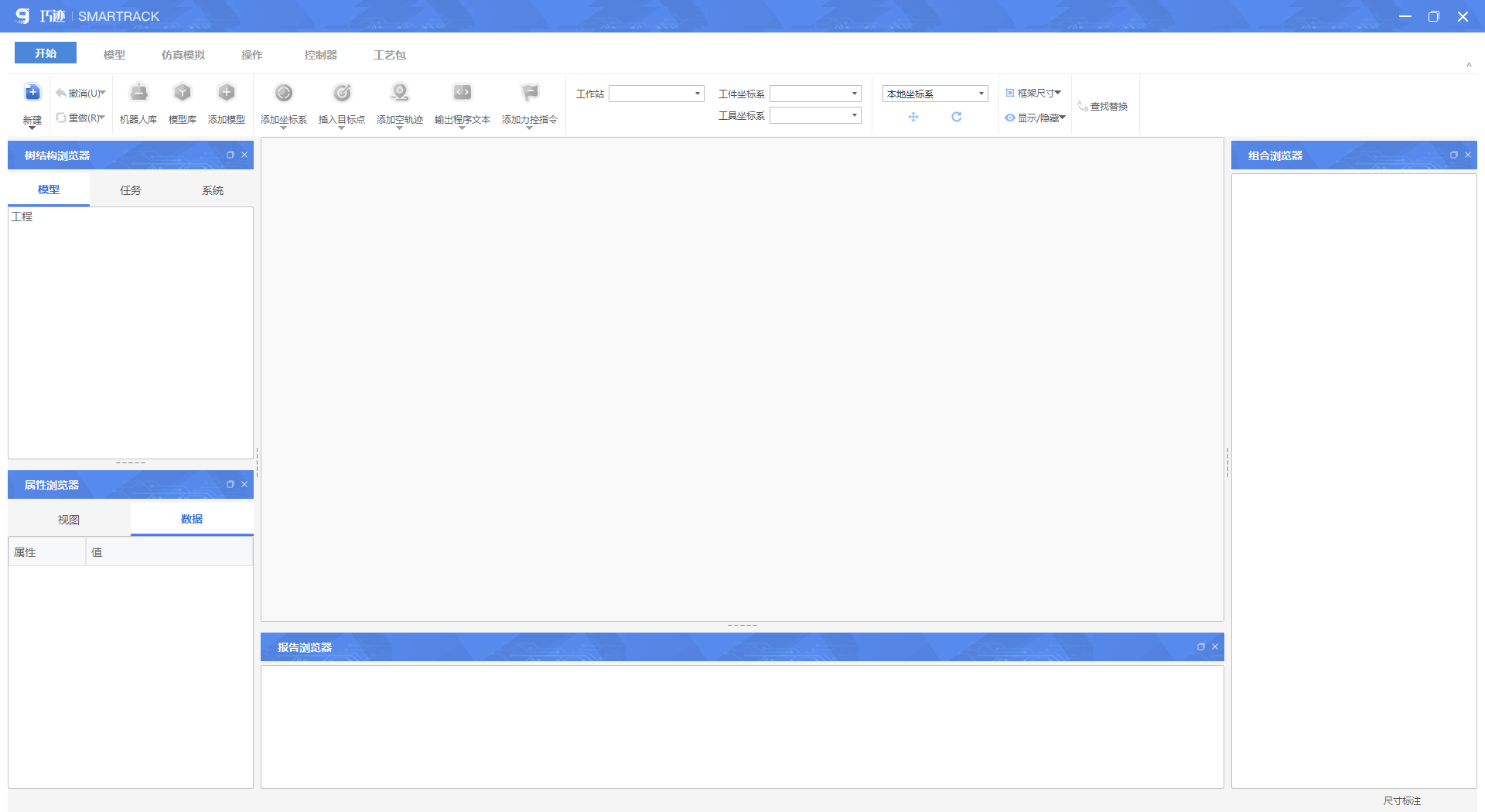
双击桌面快捷方式 巧迹Smartrack1.4.1,即可进入用户界面,未创建工作站时,功能全部置灰,如图所示。
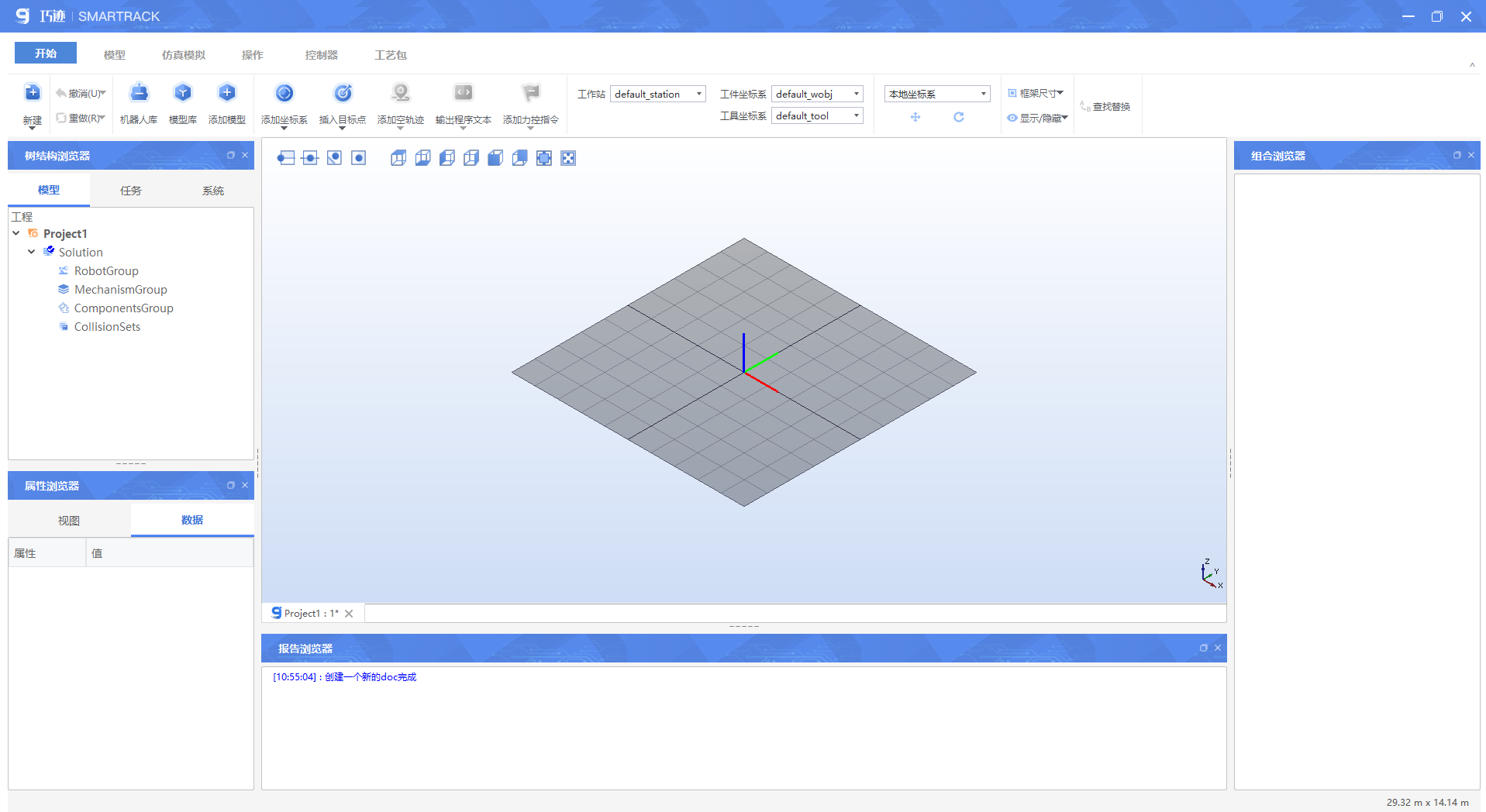
新建工作站后,功能菜单高亮激活,如图所示。
3.2 软件界面总体介绍
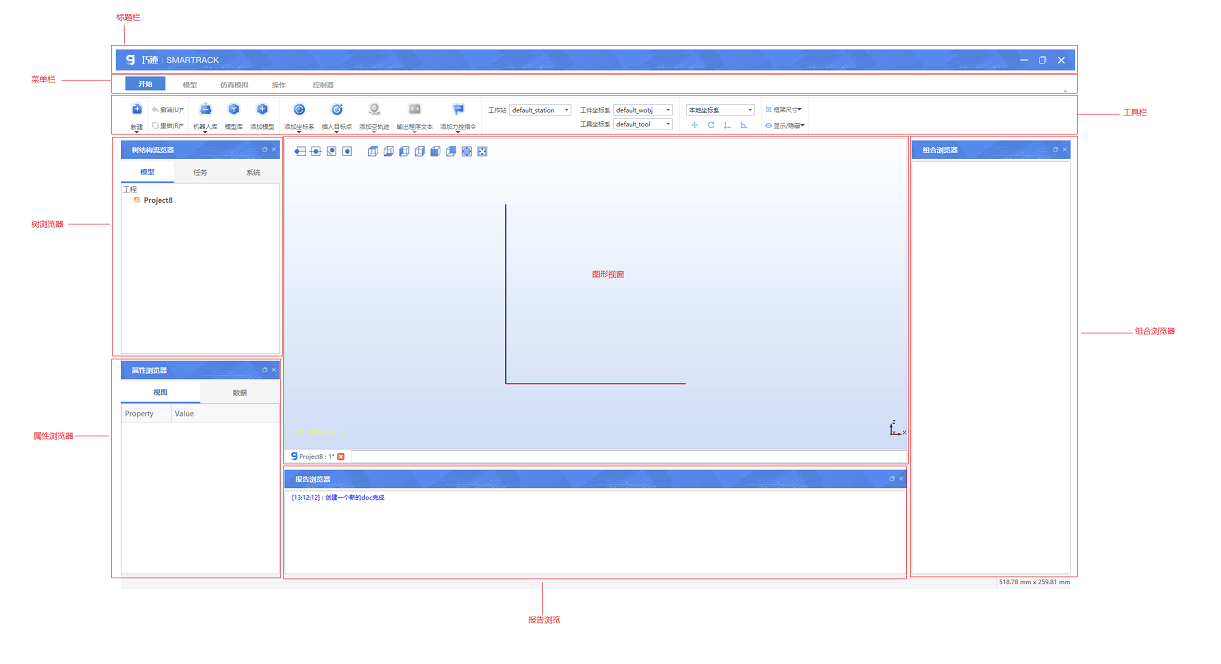
软件界面主要由 8部分组成,包括:标题栏、菜单栏、工具栏、工作管理树浏览器、属性浏览器、图形视窗、组合浏览器、报告浏览器,如图所示。
3.3 标题栏
标题栏:标题栏用于显示软件名称。如图所示。
![]()
3.4 菜单栏
菜单栏是将控制命令分类后放到不同菜单中。菜单栏包括:开始、模型、仿真模拟、操作、控制器、工艺包。如图所示。

开始菜单包含工具如图所示。

模型菜单包含工具如图所示。

仿真模拟包含工具如图所示。

操作菜单包含工具,如图所示。

控制器菜单包含工具,如图所示。

工艺包菜单栏包含码垛工艺包,如图所示

3.5 工具栏
3.5.1 开始
开始菜单-工具栏,各命令功能如下表(后续章节会对相应功能做详细介绍)。
| 指令 | 功能 | 备注 |
|---|---|---|
| 新建 | 新建一个.wir项目 | |
| 打开 | 打开一个.wir项目 | |
| 打开例子 | 打开一个软件自带的.st项目例子 | |
| 导入 | 目前支持文件格式:.step/.stp | |
| 导出 | 目前支持文件格式:.step/.stp | |
| 关闭 | 关闭当前.wir项目 | |
| 保存 | 保存当前项目 | |
| 另存为 | 将当前项目另存为其他文件名,显示另存的项目 | |
| 退出 | 关闭软件 | |
| 撤销 | 回退到上一操作 | |
| 重做 | 恢复撤销的操作 | |
| 撤销列表 | 选择撤销到某一步操作,默认20步 | |
| 重做列表 | 选择重做到某一步操作,默认20步 | |
| 机器人库 | 导入机器人,机器人库分为本地库和云端库,云端库有海量机器人可进行下载,下载成功后会插入到3D视窗并存储在本地,供用户下一次快速插入(当前版本支持生成ABB、Fanuc、Kuka、安川Motoman、UR、新时达、东控机器人后置程序) |  |
| 模型库 | 导入模型,目前支持文件格式:.step/.stp | |
| 添加模型 | 导入模型,目前支持文件格式:.step/.stp | |
| 添加坐标系-添加工具坐标 | 添加一个工件坐标系 | |
| 添加坐标系-添加工具坐标 | 添加一个工具坐标系 | |
| 插入目标点-插入目标点 | 插入一个目标点 | |
| 插入目标点-插入机器人末端点 | 插入一个机器人末端点 | |
| 添加空轨迹-添加空轨迹 | 添加一条空的轨迹 | |
| 添加空轨迹-添加力控轨迹 | 添加一条力控轨迹 | |
| 输出程序文本-输出程序文本 | 输出txt格式,机器人可执行程序文本,用户可另存为到PC任意路径 | |
| 输出程序文本-生成本地文件 | 在巧迹中生成可执行程序文本 | |
| 指令-添加力控指令 | 程序文本快捷添加指令模板 | |
| 工作站 | 展示当前工作站工作目标 | |
| 工件坐标系 | 展示当前工作站工作目标 | |
| 工具坐标系 | 展示当前工作站工作目标 | |
| 移动 | 在当前坐标系中拖放对象 |  |
| 旋转 | 在当前坐标系手动拖拽目标对象沿各轴旋转 | 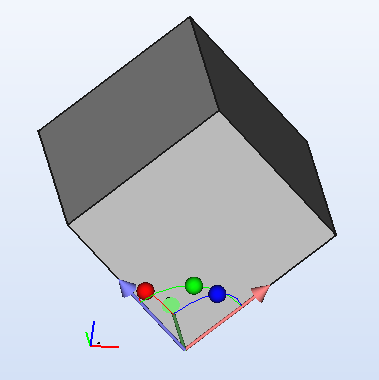 |
| 框架尺寸 | 调整图形视窗中坐标系的大、中、小 | |
| 显示/隐藏 | 控制整个工作站(所有部件、全部路径、所有目标点、所有坐标系)在图形视窗中的显示/隐藏状态。 | |
| 查找替换 | 可对程序文本关键字进行查找\替换,筛选替换范围 |  |
3.5.2 模型
模型菜单-工具栏,各命令功能见下表(后续章节会对相应功能做详细介绍)。
| 指令 | 功能 | 备注 |
|---|---|---|
| 立方体 | 添加一个立方体模型 | |
| 圆柱体 | 添加一个圆柱体模型 | |
| 球体 | 添加一个球体模型 | |
| 圆锥体 | 添加一个圆锥体模型 | |
| 圆环体 | 添加一个圆环体模型 | |
| 创建零件 | 添加一个零件,零件可由1个或多个实体组成 |  |
| 测量距离 | 可测量点到点之间的直线距离 | |
| 测量角度 | 测量两条线段间的角度 | |
| 测量圆 | 测量圆的直径 | |
| 机械设备 | 可创建复杂的往复型运动的机械设备结构 | |
| 传送带 | 可添加传送带结构 |
3.5.3 仿真模拟
模型菜单-工具栏,各命令功能见下表(后续章节会对相应功能做详细介绍)。
| 指令 | 功能 | 备注 |
|---|---|---|
| 碰撞设置 | 添加碰撞对,将需要检测是否碰撞的模型添加到碰撞对中,仿真模拟是否发生碰撞 | |
| 仿真模拟 | 对工作站生成的运动轨迹进行仿真动画模拟 | |
| 实况 | 和机器人进行通讯,获取工作站中所有模型文件,实时反馈机器人的运动姿态 (目前仅支持UR机器人实况反馈) | |
| 开始录制 结束录制 | 可对仿真动画进行录制,方便用户向客户进行效果展示 |
3.5.4 操作
| 指令 | 功能 | 备注 |
|---|---|---|
| 新建几何 | 创建工件的加工区域 | |
| 新建工具 | 创建加工的工具形状 | |
| 新建操作 | 配置工件加工的工艺参数 | |
| SVG | 导入SVG图片,生成轨迹 |
3.5.5 控制器
| 指令 | 功能 | 备注 |
|---|---|---|
| 建立连接 | 和机器人建立通讯连接 | |
| 应用全部 | 将本地程序文本同步至机器人控制器 | |
| 添加Py文件 | 用户可以使用python进行编程实现机器人工作站仿真 | |
| 添加程序文本 | 用户可以新增程序文本,使用巧迹的语言进行编程并且一键生成相应机器人的可执行程序文本 | |
| 执行 | 检测当前程序文本,3D视窗进行仿真执行 | |
| 停止 | 停止仿真 | |
| pptomain | 指针跳转main函数开始 | |
| 示教器 | 打开ABB虚拟示教器 | |
| G语言 | 图形化编程界面 |
3.5.5.1 巧迹语言
巧迹语言
巧迹语言是内部表示机器人信息的语言,巧迹语言是rapid语言的一个子集,使用rapid语言解析器可完全解析巧迹语言。部分地方对rapid语言进行了简化,以下列出:
数据
wobjdata
VAR wobjdata wobj := [[x, y, z, w, i, j, k], false];
工件坐标系,由一个七元数组与bool值组成的数组,七元数组为工件坐标系在空间中的姿态,由空间坐标与四元数组成;bool值表示是否使用该工件坐标系
tooldata
VAR tooldata tool := [[x, y, z, w, i, j, k], false];
工具坐标系,由一个七元数组与bool值组成的数组,七元数组为工件坐标系在空间中的姿态,由空间坐标与四元数组成;bool值表示是否使用该工具坐标系
posedata
VAR posedata p := [x, y, z, w, i, j, k];
该类型表示机器人在空间中的姿态,由空间坐标与四元数组成
axisdata
VAR axisdata a := [j1, j2, j3, j4, j5, j6];
机器人的六个轴角
指令
MoveJ
MoveJ axisdata, speeddata, 0, tooldata, wobjdata;
# 参数
axisdata 轴角位置
tooldata 工具坐标系
wobjdata 工件坐标系
speeddata 速度
0 zone?
机器人轴运动指令。
MoveL
MoveL posedata, speeddata, 0, tooldata, wobjdata;
# 参数
posedata 点空间位姿
tooldata 工具坐标系
wobjdata 工件坐标系
speeddata 速度
机器人线性运动指令。
变量声明
VAR <type> <variable> ;
VAR <type> <variable> := <expression> ;
变量由变量声明引入,在声明的变量名前需指明数据类型,支持以上数据类型,声明时可初始化,给变量初始化为表达式的值,否则默认空值。
3.6.工艺包
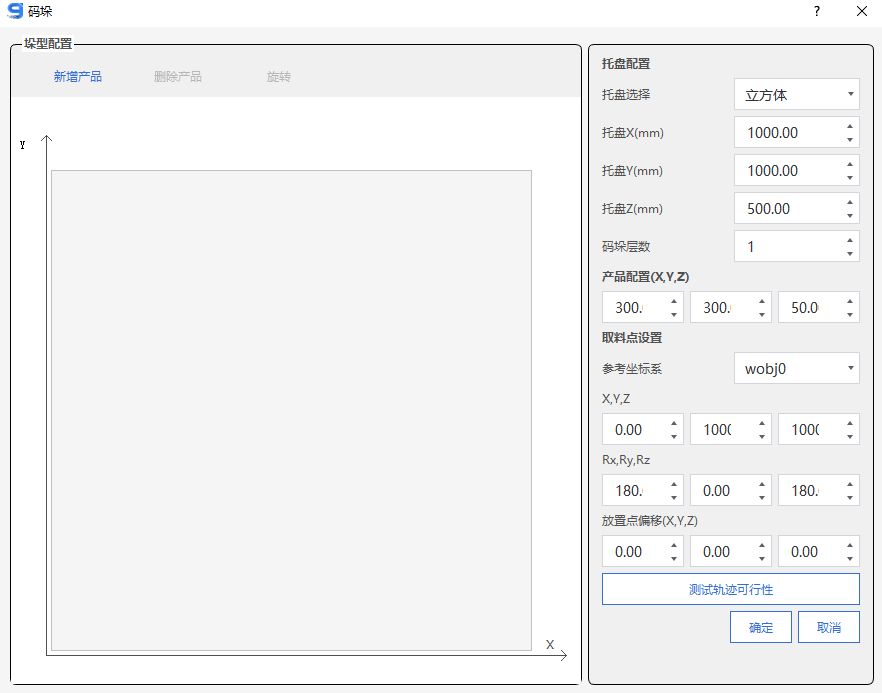
3.6.1码垛工艺包
可通过人机交互交界面,配置码垛跺型、层数,快速生成多条码垛轨迹。同时可查看第四章、第五章详细了解。
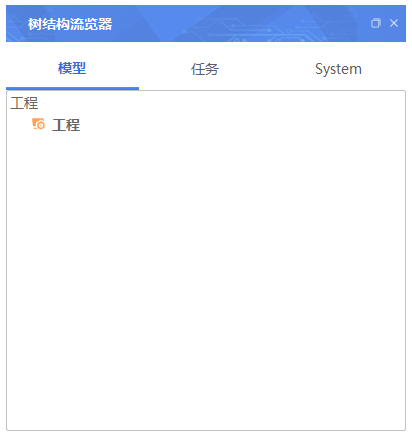
3.7 树结构浏览器
树结构浏览器是将工作站管理分类后放到不同菜单中。工作管理器包括:模型、任务、系统。如下图所示。各菜单功能模块如下表所示。
| 类型 | 功能 |
|---|---|
| 模型 | 管理工作站模型 |
| 任务 | 工作站坐标系管理、目标点管理、轨迹管理、逻辑点管理、力控管理等 |
| 系统 | 工作站后置文件、IO信号管理 |
3.8 属性浏览器
属性浏览器可以查看/编辑相关原件的各个属性。如图所示。

3.9 组合浏览器
组合浏览器是工作站操作控制模块。模型移动,坐标设定,仿真模拟,新建几何,新建操作均在这里完成。如图所示。

3.10 报告浏览器
报告浏览器中可以显示软件操作中的警告、错误和日志等信息,如图所示。

3.11 图形视窗
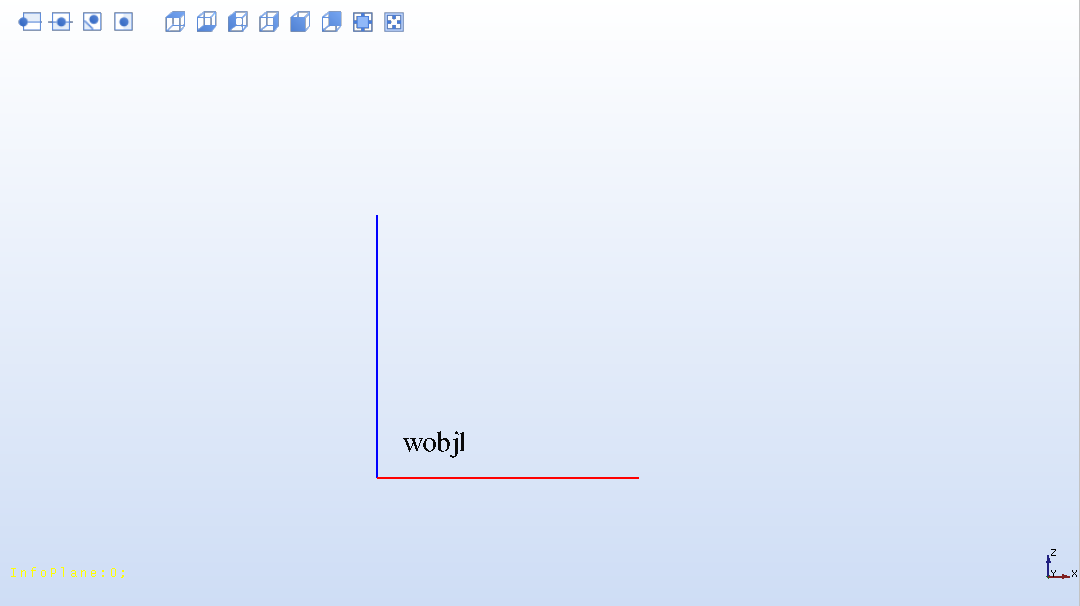
3.11.1 图形视窗简介
图形视窗为软件中显示图形的界面,可显示工作管理树中所有的对象,如图所示。当对象为显示状态时,对象图形会显示在图形界面,隐藏时不显示。右下角的坐标系为世界坐标系。左上角为快捷工具栏。
3.11.2 图形视窗右键菜单
视图界面右键菜单。如图所示。

3.11.3 图形视窗操作方式
滑轮:缩放视图
Ctrl+鼠标右键:移动视图
Shfit+鼠标右键:旋转视图
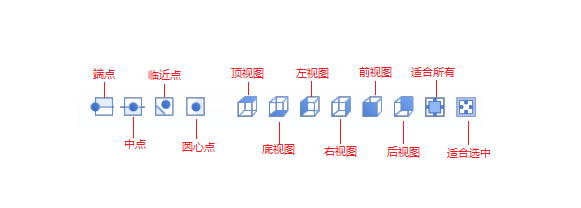
3.11.4 快捷工具栏
快捷工具栏指令如图所示