第四章 快速入门
4.1 新建工作站
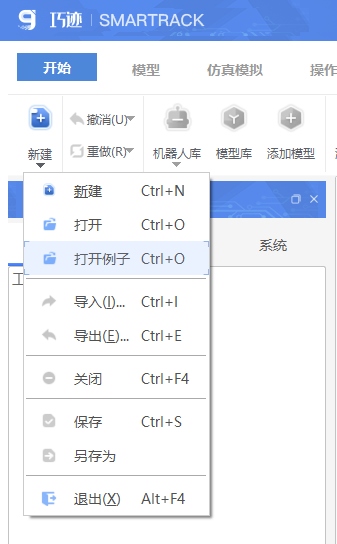
点击“新建”,如图4-1所示。
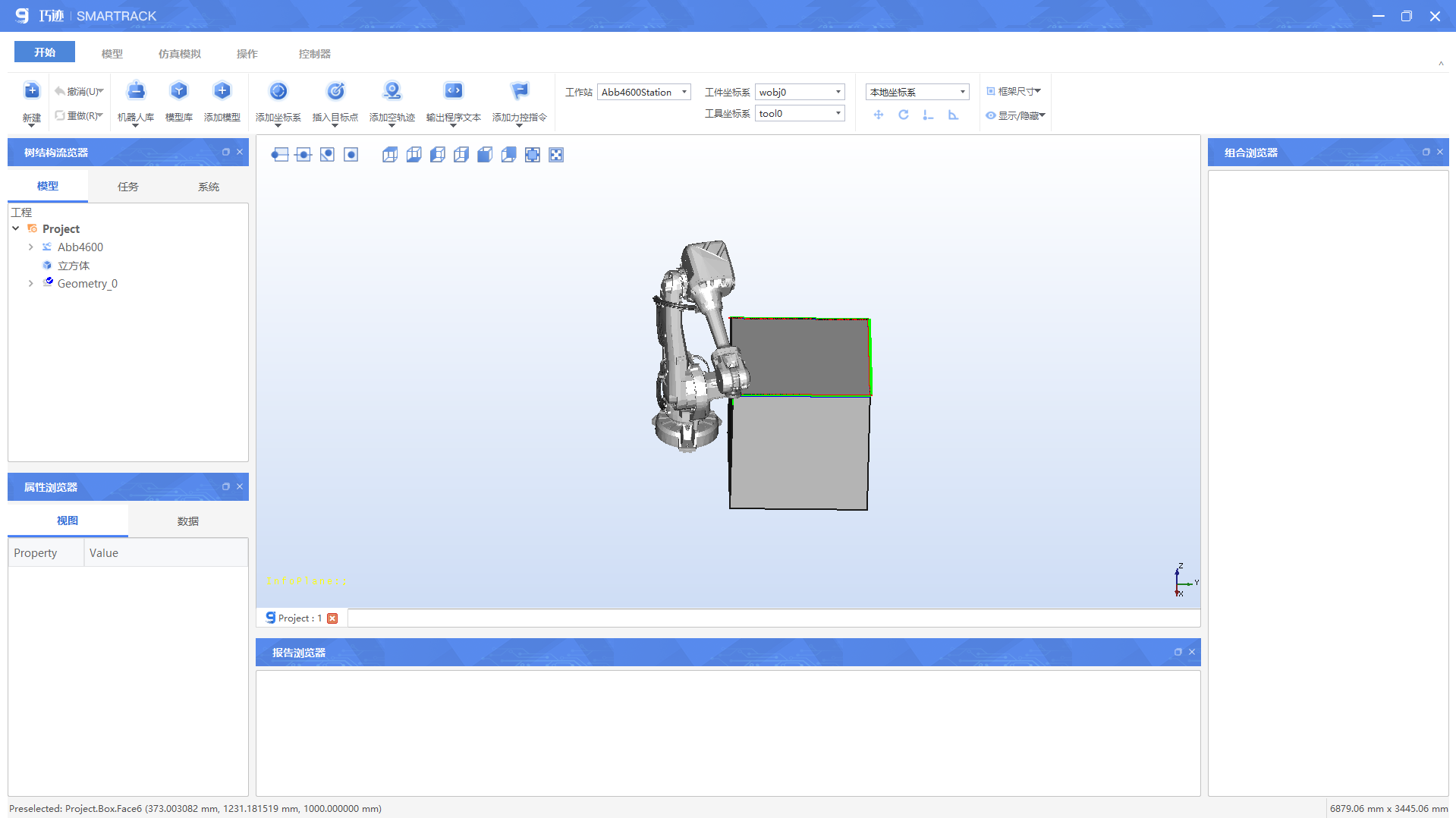
视图窗口新建一个工作站,如图4-2所示。
4.2 打开工程
点击“打开”,如图4-3所示。
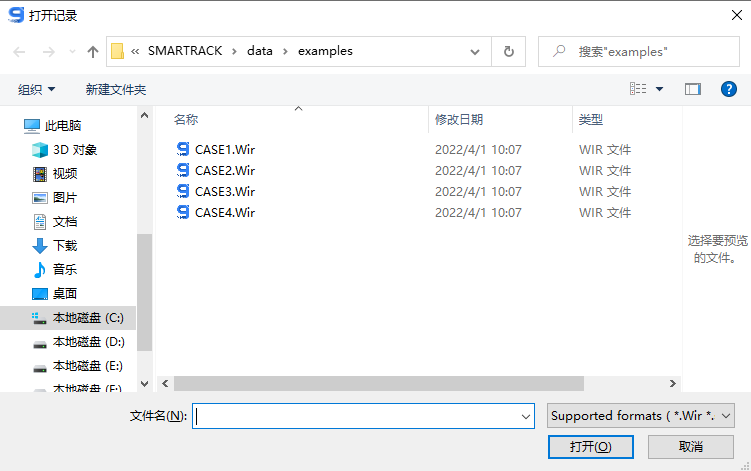
根据自定义路径,打开工程文件。如图4-4所示。
打开工程文件后,如图4-5所示。
4.3 打开例子
点击“打开例子”,如图4-6所示。
打开例子对应路径,即可选择本软件自带的一个例子工程文件。如图4-7所示。
4.4导入模型
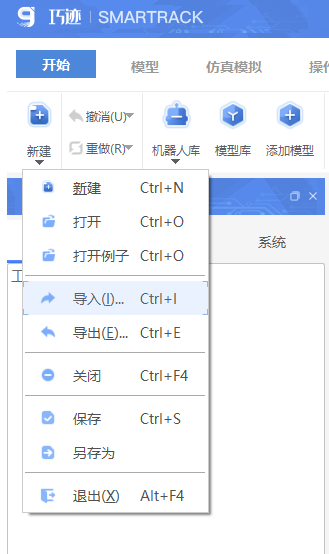
点击“导入”,如图4-8所示。
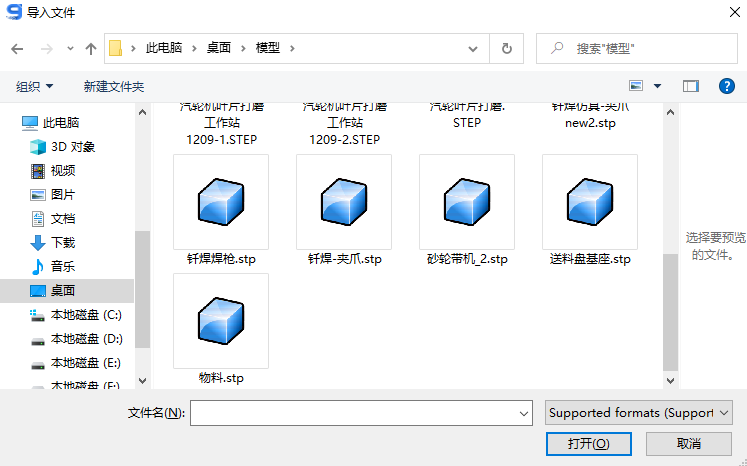
可从自定义路径选择需要的模型进行导入。如图4-9所示。
4.5 导出模型
点击“导出”,如图4-10所示。
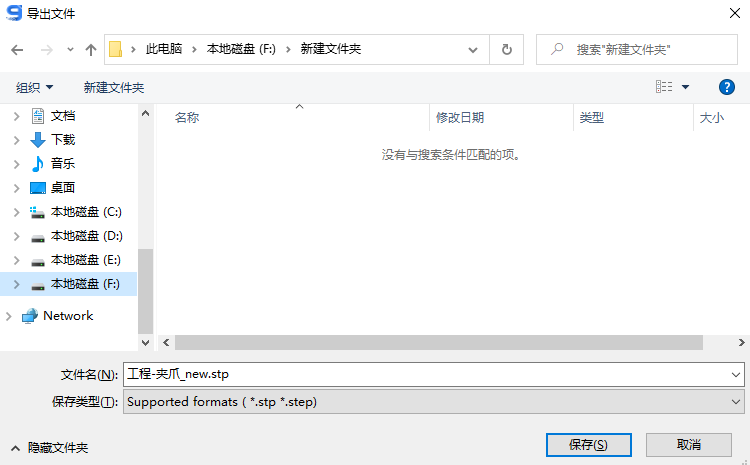
可将模型自定义路径\自定义名称导出保存。如图4-11所示。
4.6 关闭
点击“关闭”,如图4-12所示,关闭当前页面。
如果是编辑过的页面,则提示是否保存工作站。如图4-13所示。

4.7 保存
点击“保存”,保存当前工作站。
4.8 另存为
点击“另存为”,可自定义名称、自定义路径进行保存。
4.9 退出
点击“退出”。即关闭软件。如果工作存在编辑过的文件,则提示是否保存工作站。
4.10 撤销
点击“撤销”。返回上一步操作。点击撤销列表,返回到指定操作。
4.11 重做
点击“重做”。重做上一步操作。点击重做列表,重做指定操作。
4.12 机器人库
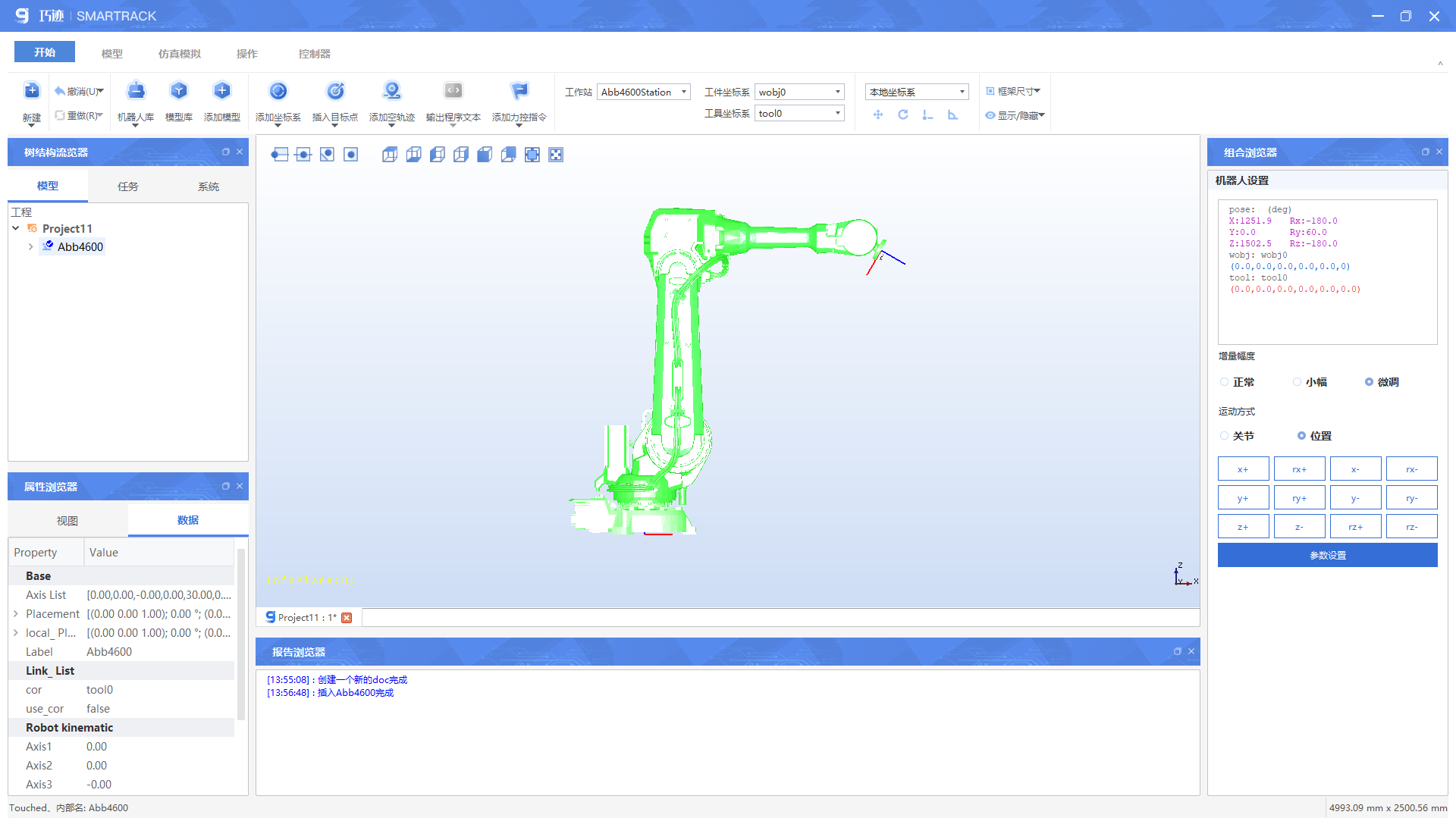
点击“机器人库”,组合浏览器展示本地机器人列表,如图4-14,点击机器人,图形视窗插入机器人;

点击云端,可以在机器人云端库进行下载,下载后机器人插入至3D视窗,同时会添加进本地库,方便用户无需再次下载,快速添加。
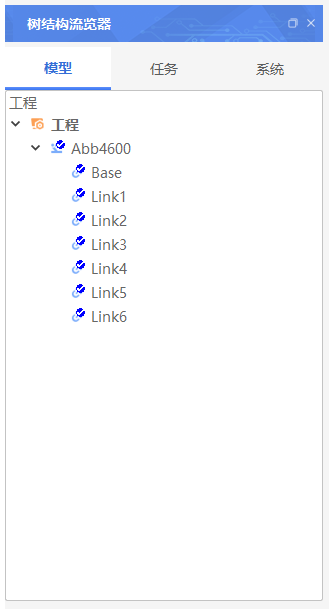
树结构-模型,新建机器人节点,如图4-15所示;
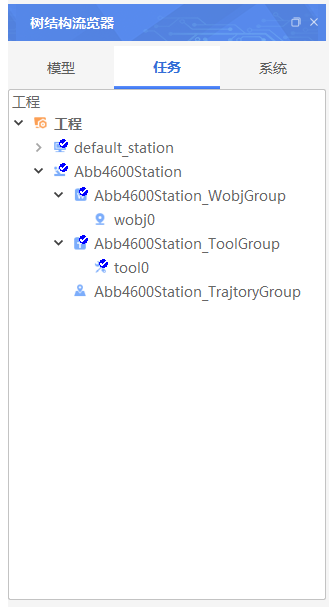
树结构-任务,新建机器人工作站,工作站包含:wobjGroup,TooljGroop,TrajtoryGroup,如图4-16所示;
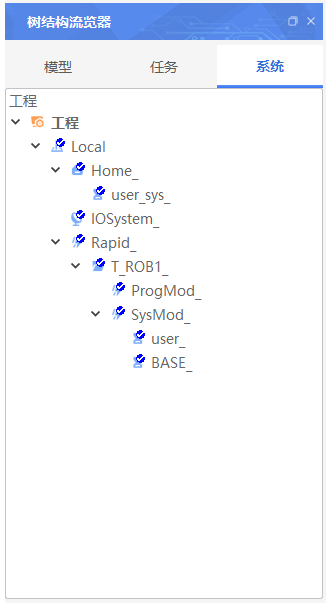
树结构-系统,新增本地程序文件夹Local,Local文件夹包含:HOME,IOSystem,rapid文件,如图4-17所示。
4.12.1 机器人
树结构-模型,单击机器人节点,图形视窗高亮机器人,属性浏览器显示机器人当前属性,组合浏览器显示机器人设置,可进行关节/位置的调节。如图4-18。
鼠标右键点击机器人,弹出功能菜单。如表4-1所示。
| 功能项 | 功能 |
|---|---|
| 回到初始位姿 | 机器人回到机械原点 |
| 设定位置 | 给目标对象设定位置,移动位置, 旋转位置 |
| 切换可见性 | 在图形视窗中显示/隐藏该对象 |
| 删除 | 删除选定对象 |
| 重命名 | 更改选定对象名称 |
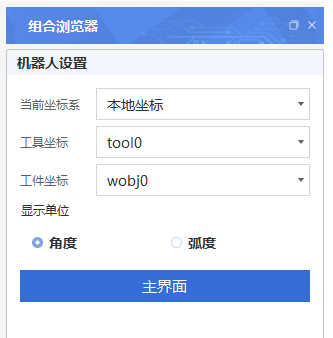
参数设置,可使机器人按设置的坐标系改变位姿,机器人位姿参数以角度/弧度进行显示。如图4-19所示。
机器人设定位置。如图4-20。
4.13 模型/模型库
点击“模型”或"模型库",即可按自定义路径导入模型文件
4.13.1 模型
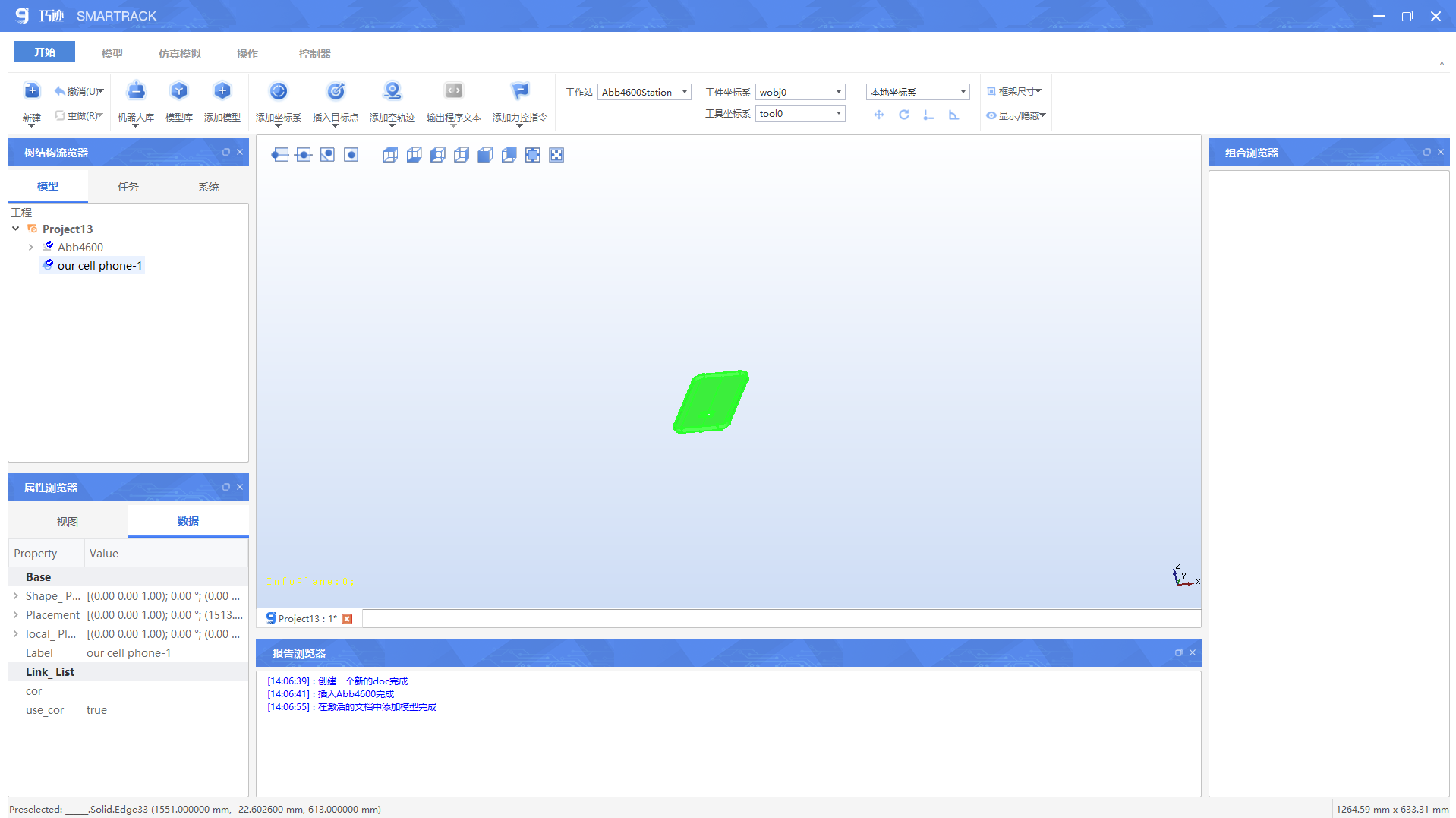
导入模型后,
图形视窗插入模型;
树结构-模型,新增模型节点;如图4-22所示;
单击模型树状节点,图形视窗高亮该模型,属性浏览器显示模型当前属性。
模型右键菜单功能项,如表4-2所示;
| 功能项 | 功能 |
|---|---|
| 编辑 | 改变内置模型的长宽高 |
| 设定位置 | 对目标对象进行放置位置、移动位置、旋转位置 |
| 设置颜色 | 对模型某一个面进行颜色设置 |
| 切换可见性 | 在图形视窗中显示/隐藏该对象 |
| 删除 | 删除选定对象 |
| 复制 | 复制一个模型 |
| 安装到 | 安装到选中部件。 |
| 绑定工件坐标 | 绑定指定工件坐标。 |
| 绑定工具坐标 | 绑定指定工具坐标。 |
| 拆除 | 解除所有绑定关系 |
| 导出 | 导出模型 |
| 放置 | 1点法/3点法放置模型 |
| 重命名 | 更改选定对象名称 |
将模型安装到机器人,如图4-23所示。

绑定工件坐标,如图4-24所示。

绑定工具坐标,如图4-25所示。

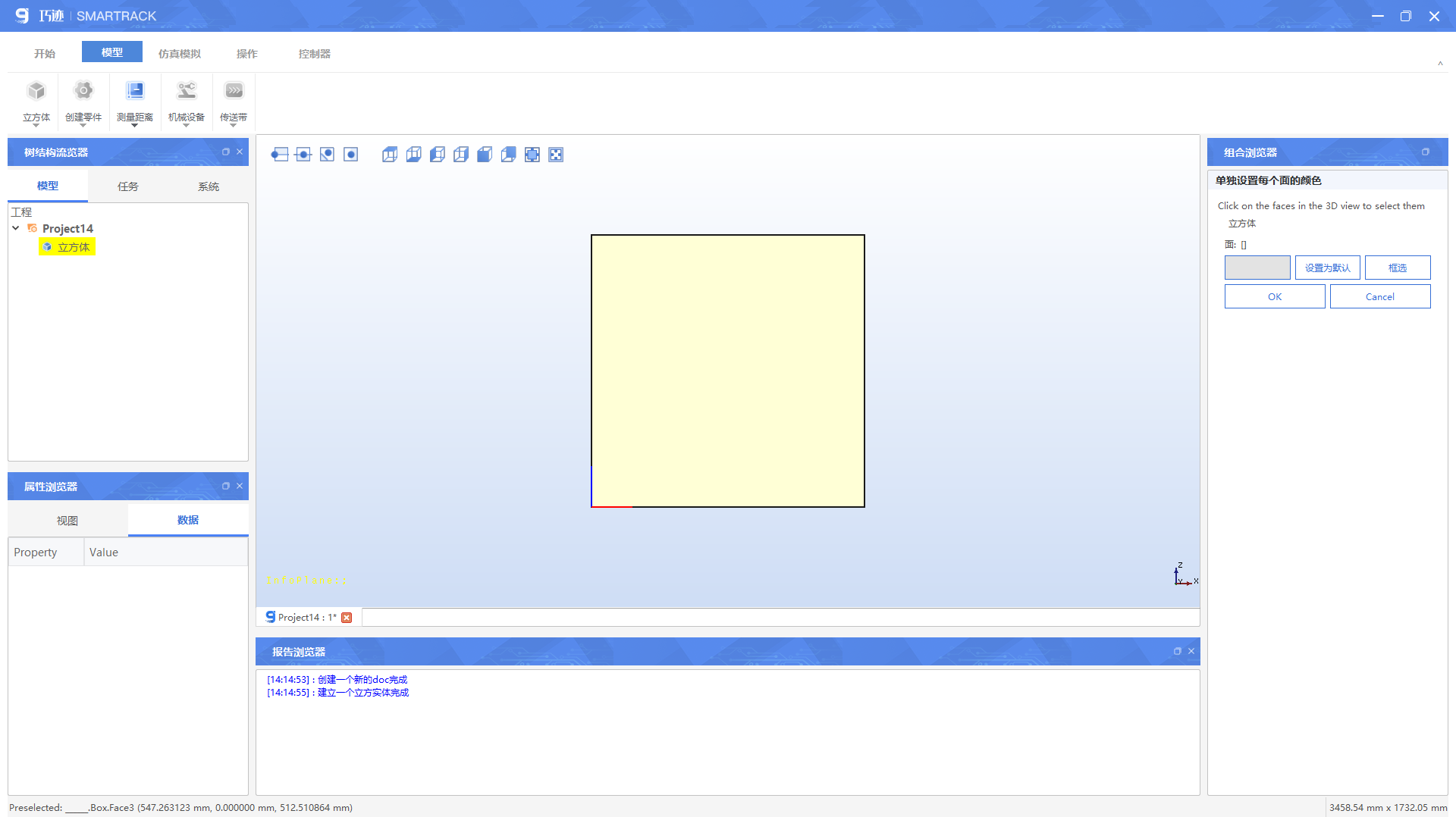
模型中的几何体,还可以自定义颜色显示。如图4-26所示。
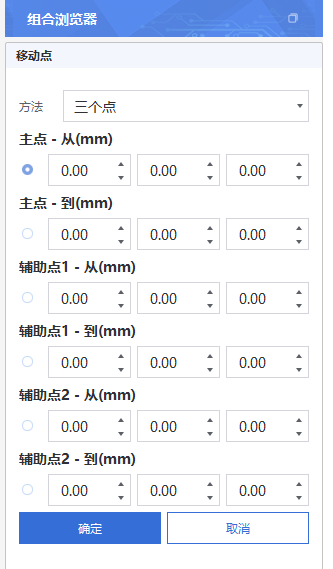
根据1点法/3点法放置模型,如图4-27。
4.14 添加坐标系
点击“添加坐标系”,可以选择:添加工件坐标、添加工具坐标。如图4-28所示。

4.14.1 添加工件坐标系
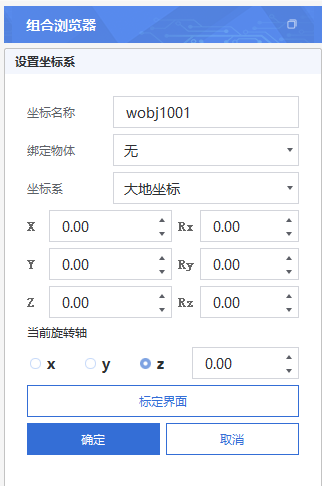
选择添加工件坐标系,设定坐标系参数。组合浏览器如图4-29所示。
标定界面,用户可自定义坐标系。组合浏览器如图4-30所示。

4.14.2 添加工具坐标系
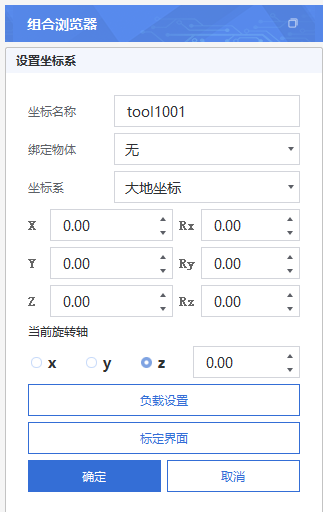
选择添加工具坐标系,组合浏览器如图4-31所示。
标定界面,用户可自定义坐标系。组合浏览器如图4-32所示。

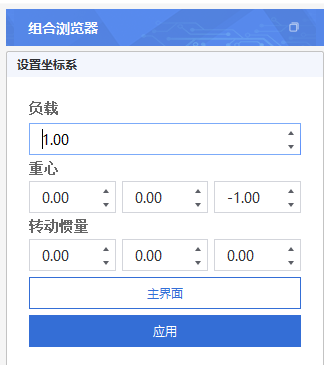
负载设置。用户可设置工具相关参数。组合浏览器如图4-33所示。
创建工具坐标系/工件坐标系,树结构浏览器即新增工具坐标系/工件坐标。如图4-34所示。
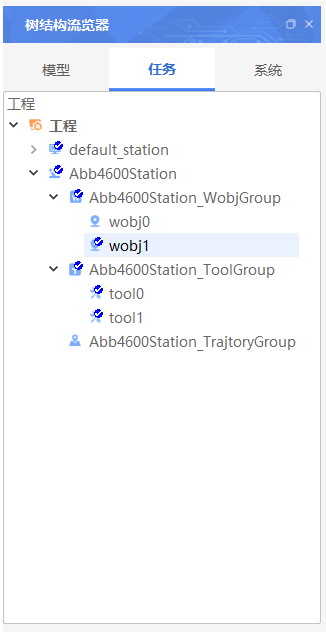
鼠标右键点击工件坐标,弹出功能菜单。如表4-3所示。
| 功能项 | 功能 |
|---|---|
| 插入目标点 | 插入目标点:插入轨迹目标点;插入机器人末端点:插入机器人一定可达的目标点 |
| 工件坐标设置 | 重新编辑工件坐标相关参数 |
| 复制 | 复制一个工件坐标 |
| 切换可见性 | 在图形视窗中显示/隐藏该对象 |
| 删除 | 删除选定对象 |
| 重命名 | 更改选定对象名称 |
鼠标右键点击工具坐标,弹出功能菜单。如表4-4所示。
| 功能项 | 功能 |
|---|---|
| 工具坐标设置 | 重新编辑工具坐标相关参数 |
| 切换可见性 | 在图形视窗中显示/隐藏该对象 |
| 复制 | 复制一个新的工具坐标 |
| 删除 | 删除选定对象 |
| 重命名 | 更改选定对象名称 |
4.15 插入目标点
点击“插入目标点”,可以选择:插入目标点、插入机器人末端点。如图4-35所示。
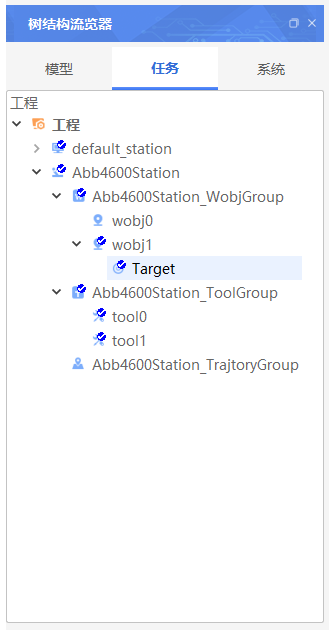
4.15.1 插入目标点
点击“插入目标点”,树结构浏览器新增目标点节点。如图4-36所示。
鼠标右键点击目标点/机器人末端点,弹出功能菜单。如表4-5所示。
| 功能项 | 功能 |
|---|---|
| 切换可见性 | 在图形视窗中显示/隐藏该对象 |
| 拷贝到 | 拷贝目标点至目标坐标 |
| 添加轨迹 | 将目标点添加到目标轨迹 |
| 移动位置 | 在指定的坐标系中定位对象 |
| 放置 | 将对象放置到某个点 |
| 删除 | 删除选定对象 |
| 重命名 | 更改选定对象名称 |
4.16 添加空轨迹
4.16.1 添加空轨迹
点击“添加空轨迹”,可以选择:添加空轨迹、创建力控轨迹。如图4-37所示。

添加空轨迹后,树结构浏览器新增一条轨迹节点。如图4-38所示。轨迹节点功能如表4-6所示

| 功能项 | 功能 |
|---|---|
| 创建一个点 | 插入轨迹目标点 |
| 创建机器人末端点 | 插入机器人一定可达的目标点 |
| 连接的轨迹 | 轨迹与轨迹进行连接 |
| 选择所有相关点 | 选择所有目标点 |
| 复制路径 | 复制一条路径 |
| 显示路径 | 显示轨迹路径 |
| 所有点重命名 | 批量更改选定对象名称 |
| 添加逻辑点 | 增加逻辑点 |
| 显示/隐藏所有点 | 视图窗口显示/隐藏所有点 |
| 切换可见性 | 在图形视窗中显示/隐藏该对象 |
| 删除 | 删除选定对象 |
| 重命名 | 更改选定对象名称 |
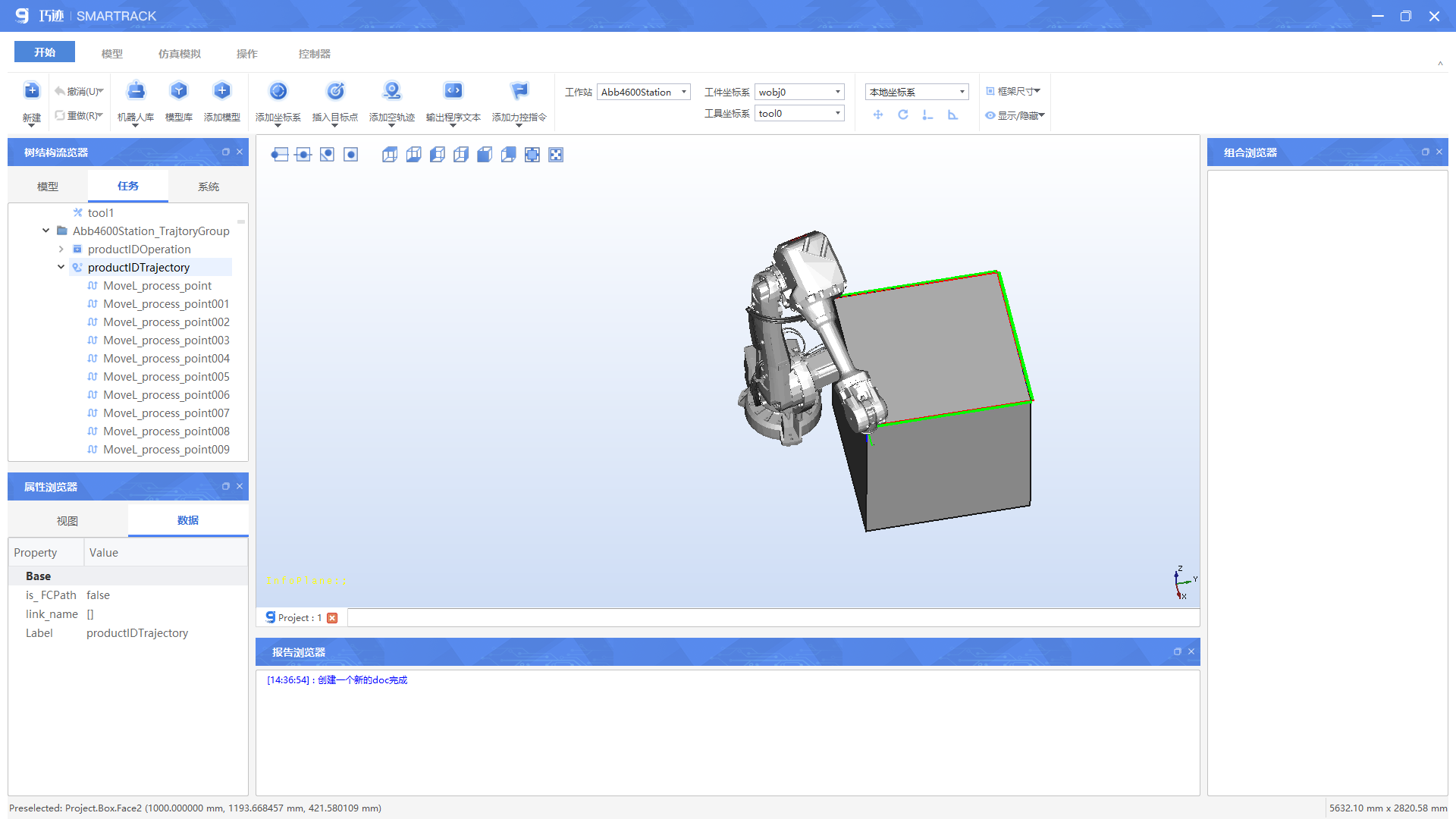
查看轨迹中的轨迹点。如图4-39所示。轨迹点功能如表4-7所示。
| 功能项 | 功能 |
|---|---|
| 关联点 | 查看该轨迹点关联某个目标点 |
| 应用到机器人 | 应用到机器人 |
| 创建一个点 | 创建一个轨迹点 |
| 创建机器人末端点 | 创建一个机器人末端点 |
| 添加逻辑点 | 添加一个逻辑点 |
| MoveL/MoveJ | 该轨迹点运动方式切换 |
| 添加圆弧点 | 添加一个圆弧点 |
| 切换可见性 | 在图形视窗中显示/隐藏该对象 |
| 拷贝到 | 复制该轨迹点至某条轨迹 |
| 速度 | 设置该轨迹点的速度 |
| 转弯半径 | 设置该轨迹点的转弯半径 |
| 设置工具坐标 | 设置该轨迹点的工具坐标 |
| 偏移 | 设置该轨迹点的偏移参数 |
| 删除 | 删除选定对象 |
| 重命名 | 更改选定对象名称 |
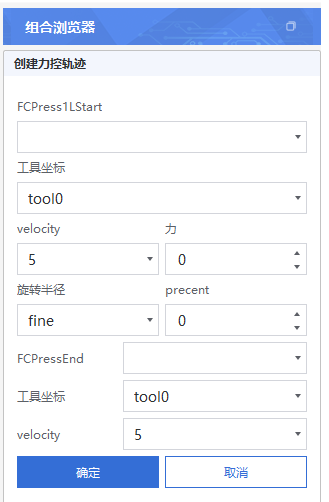
4.16.2 添加力控轨迹
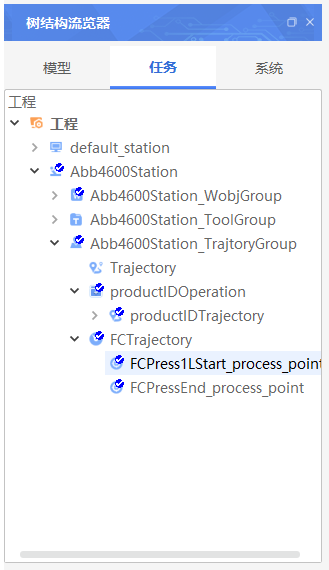
点击“添加力控轨迹”,组合浏览器打开添加力控轨迹对话框。如图4-40所示。添加力控轨迹后,树结构浏览器新增一条力控轨迹节点。如图4-41所示。力控轨迹节点功能如表4-8所示。
| 功能项 | 功能 |
|---|---|
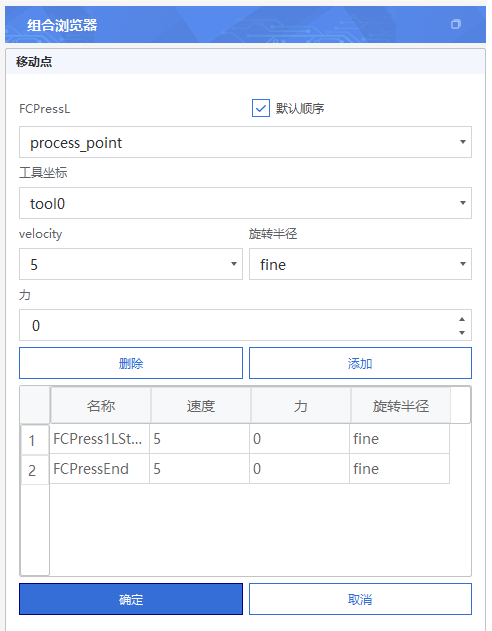
| 添加力控点 | 添加一个力控点。如图4-42所示。 |
| 选择所有相关点 | 选择该力控轨迹所有相关点 |
| 复制路径 | 复制一条力控轨迹 |
| 所有点重命名 | 更改所有关联点名称 |
| 显示路径 | 视图窗口显示该条力控轨迹 |
| 添加逻辑点 | 添加一个逻辑点 |
| 显示/隐藏所有点 | 在图形视窗中显示/隐藏所有点 |
| 切换可见性 | 在图形视窗中显示/隐藏该对象 |
| 删除 | 删除选定对象 |
| 重命名 | 更改选定对象名称 |
添加力控点,如图4-42所示。
4.17 输出程序文本
点击“输出程序文本”,可以选择:输出程序文本、输出本地文件。如图4-43所示。
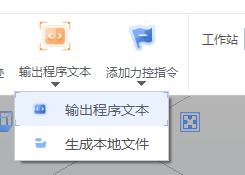
输出程序文本,图形视窗新建窗口,输出程序文本,可进行编辑
生成本地文件,生成本地程序文件。
4.18 添加力控指令
点击“快捷指令”,可在程序文本中快速插入一条指令模板。
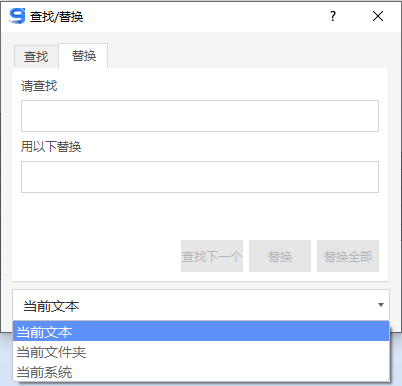
4.19 查找替换
点击“查找\替换”弹窗显示对话框,可以查询替换后置程序文本中的文本。替换范围包括:当前文本、当前系统、当前文件夹.如图4-44所示。
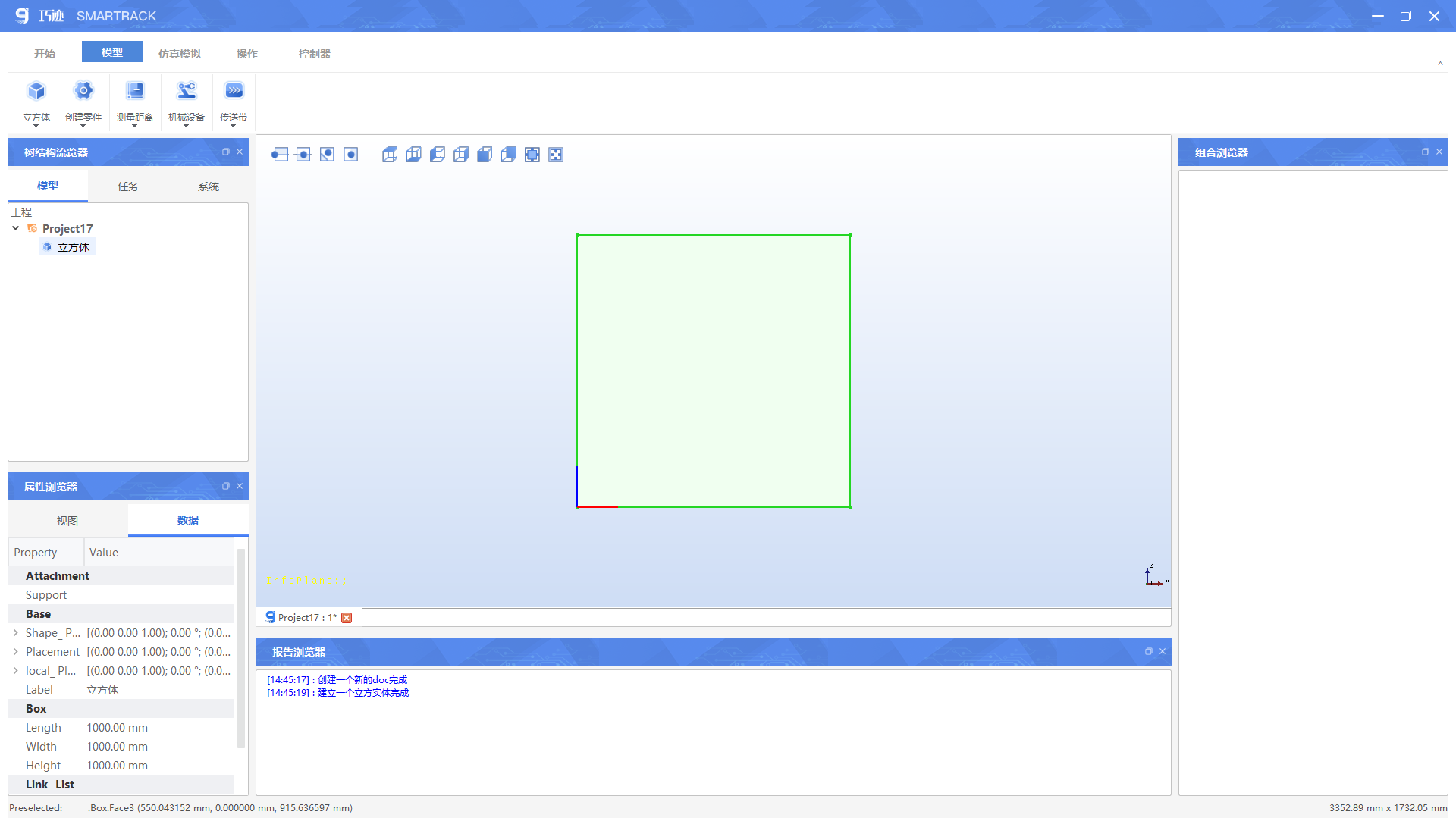
4.20 立方体
快速插入一个几何体,插入后,图形视窗新建一个几何体,工作站树结构新增一个几何体节点。如图4-45所示。几何体功能项,如表4-9所示。
| 功能项 | 功能 |
|---|---|
| 编辑几何体 | 编辑几何体参数 |
| 设定位置 | 对几何体设定位置、移动位置、旋转位置 |
| 设置颜色 | 给几何体的某一个面设置颜色 |
| 切换可见性 | 在图形视窗中显示/隐藏该对象 |
| 删除 | 删除选定对象 |
| 复制 | 复制一个几何体 |
| 安装到 | 安装到选中部件 |
| 绑定工件坐标 | 绑定指定工件坐标 |
| 绑定工具坐标 | 绑定指定工具坐标 |
| 拆除 | 解除所有绑定关系 |
| 导出 | 将几何体导出stp文件 |
| 放置 | 将几何体进行放置,放置方法有1点法和三点法 |
| 重命名 | 更改选定对象名称 |
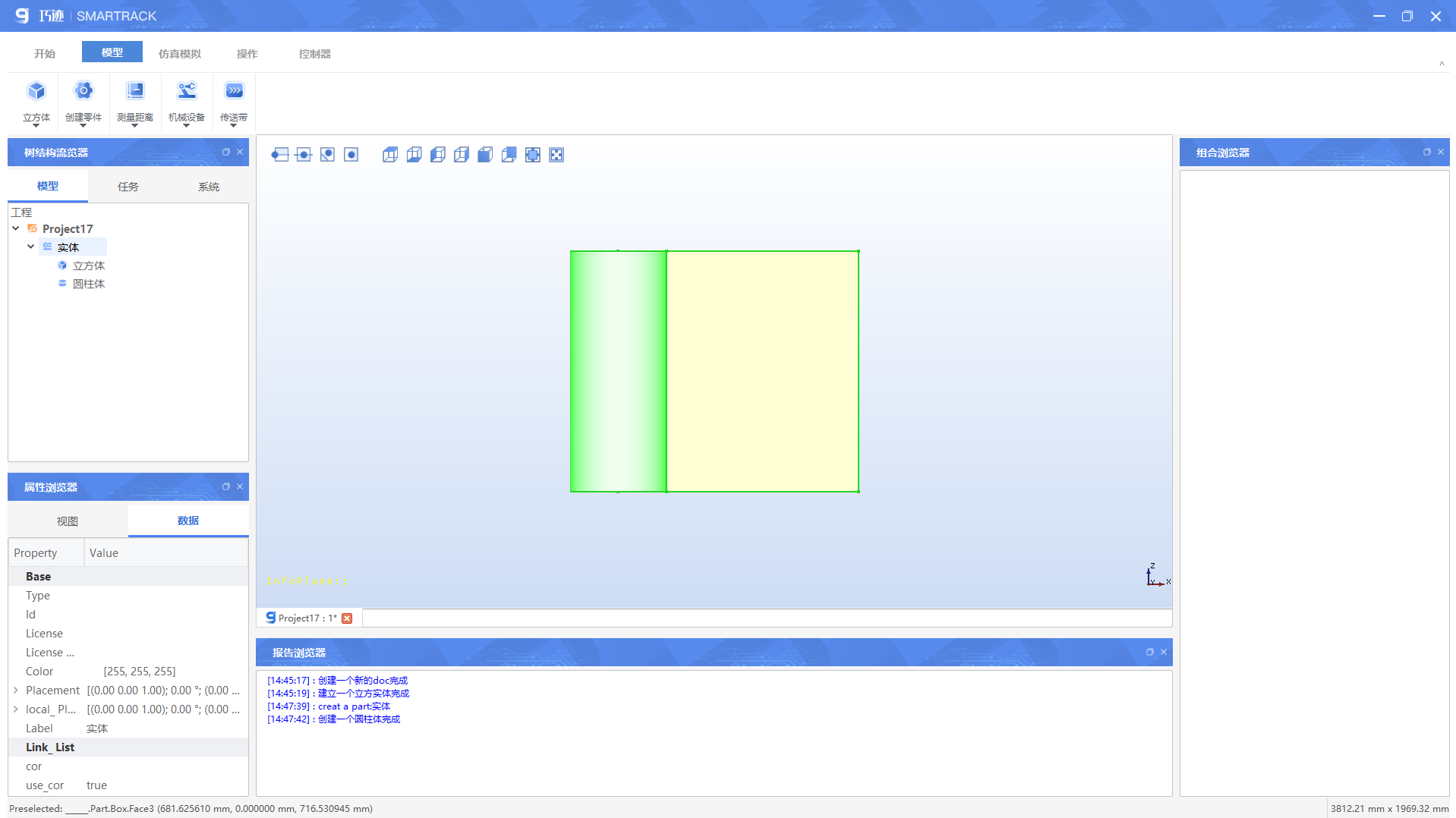
4.21 创建零件
点击创建零件,工作站树结构新增一个零件节点。如图4-46所示。零件功能项,如表4-10所示。
| 功能项 | 功能 |
|---|---|
| 位置 | 设定位置:在指定的坐标系中定位对象。 移动位置:按照规定的距离移动一组对象。 旋转位置:旋转选定的位置。 |
| 切换可见性 | 在图形视窗中显示/隐藏该对象 |
| 删除 | 删除选定对象 |
| 安装到 | 安装到选中部件 |
| 绑定工件坐标 | 绑定指定工件坐标 |
| 绑定工具坐标 | 绑定指定工具坐标 |
| 拆除 | 解除所有绑定关系 |
| 导出 | 将几何体导出stp文件 |
| 放置 | 将几何体进行放置,放置方法有1点法和三点法 |
| 重命名 | 更改选定对象名称 |
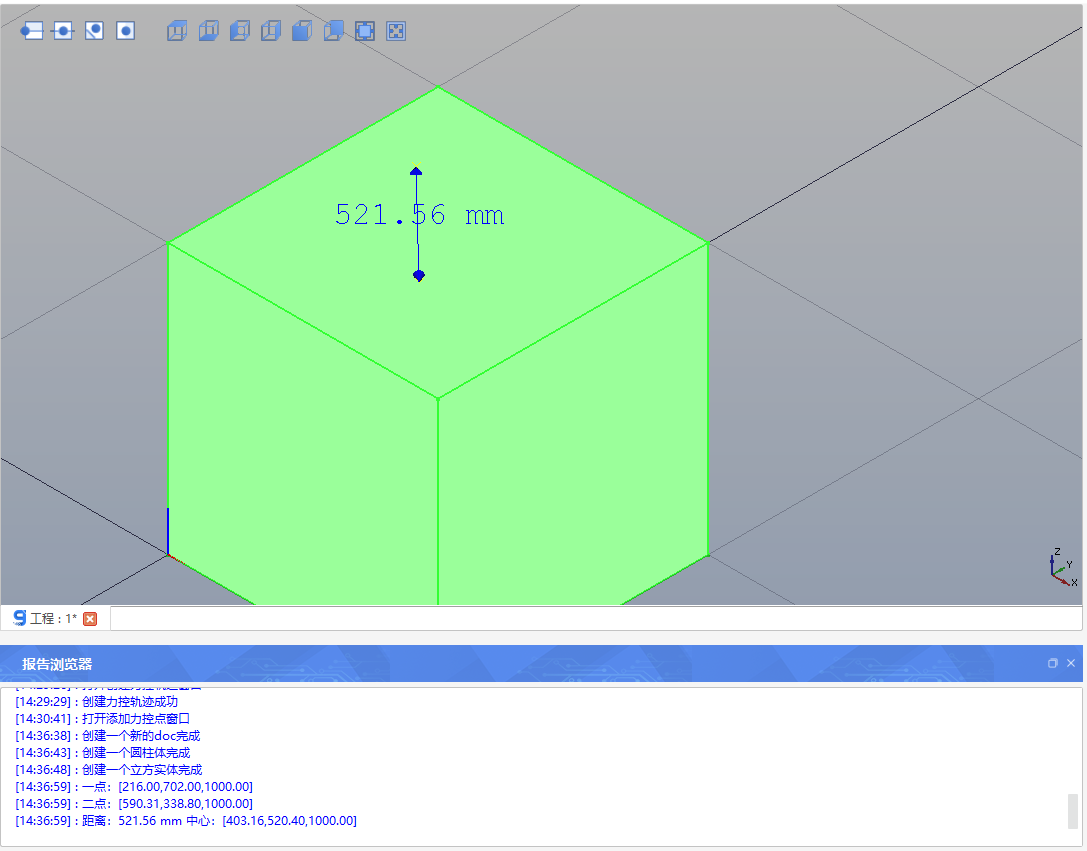
4.22 测量
选择测量距离功能,标尺选择两个点,3D视窗即可显示测量信息,报告浏览器可查看选取的点位信息及距离信息,点击鼠标右键,即退出测量功能。
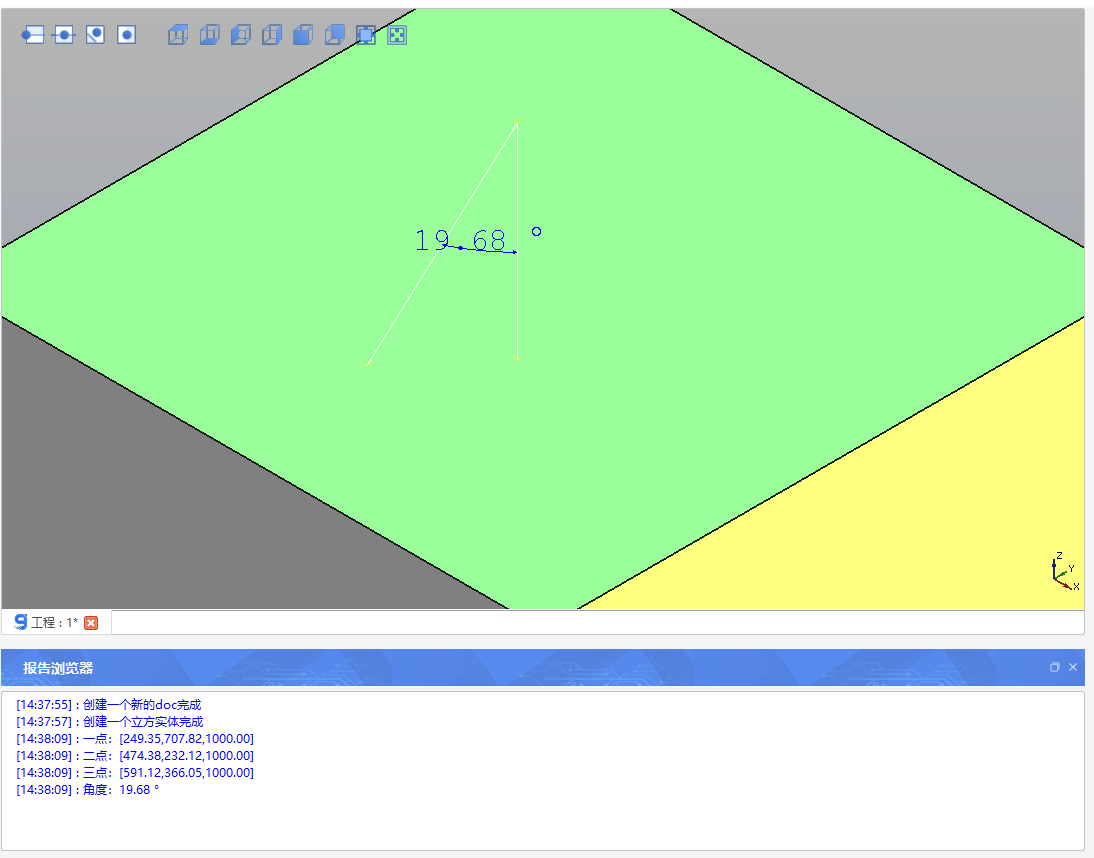
选择测量角度功能,标尺选择三个点,3D视窗即可显示测量信息,报告浏览器可查看选取的点位信息及角度信息,点击鼠标右键,即退出测量功能。
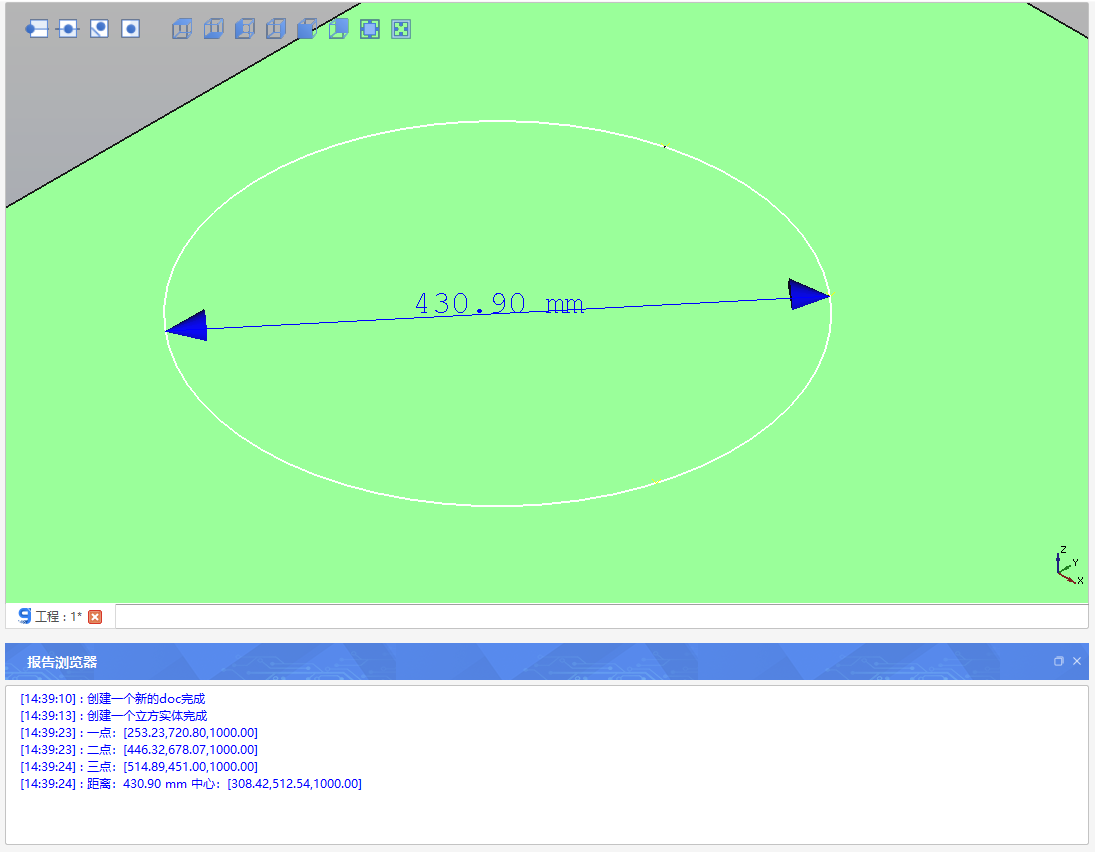
选择测量圆形直径功能,标尺选择三个点,3D视窗即可显示测量信息,报告浏览器可查看选取的点位信息及直径信息,点击鼠标右键,即退出测量功能。
如图4-47所示。
4.23 机械设备
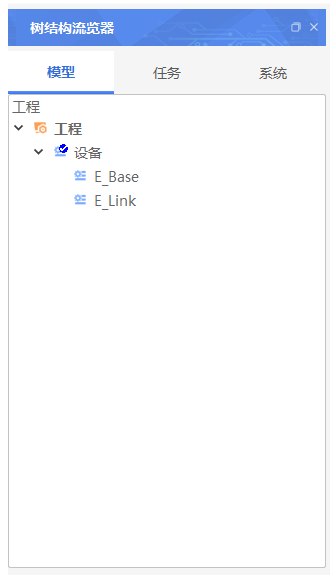
点击“机械设备”,树结构-模型新增一个机械设备节点,拖动相应几何体,至机械设备的base节点或者link节点,base节点代表固定关节,link节点代表往复运动的关节轴。如图4-48。
导入设备基座模型,并拖动模型至BASE节点,导入移动关节模型,并拖拽至Link节点。这里均以正方体作为示例。如图4-49

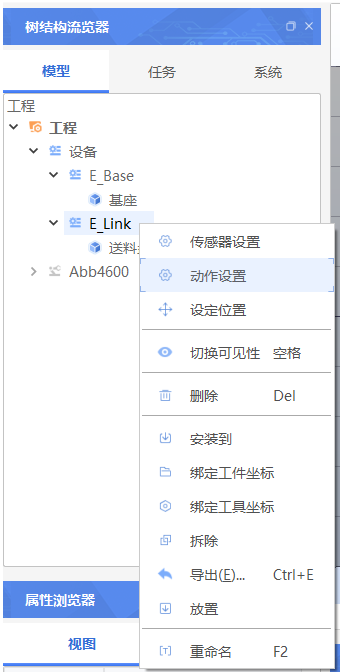
LINK节点,点击右键,点击动作设置对话框,如图4-50。
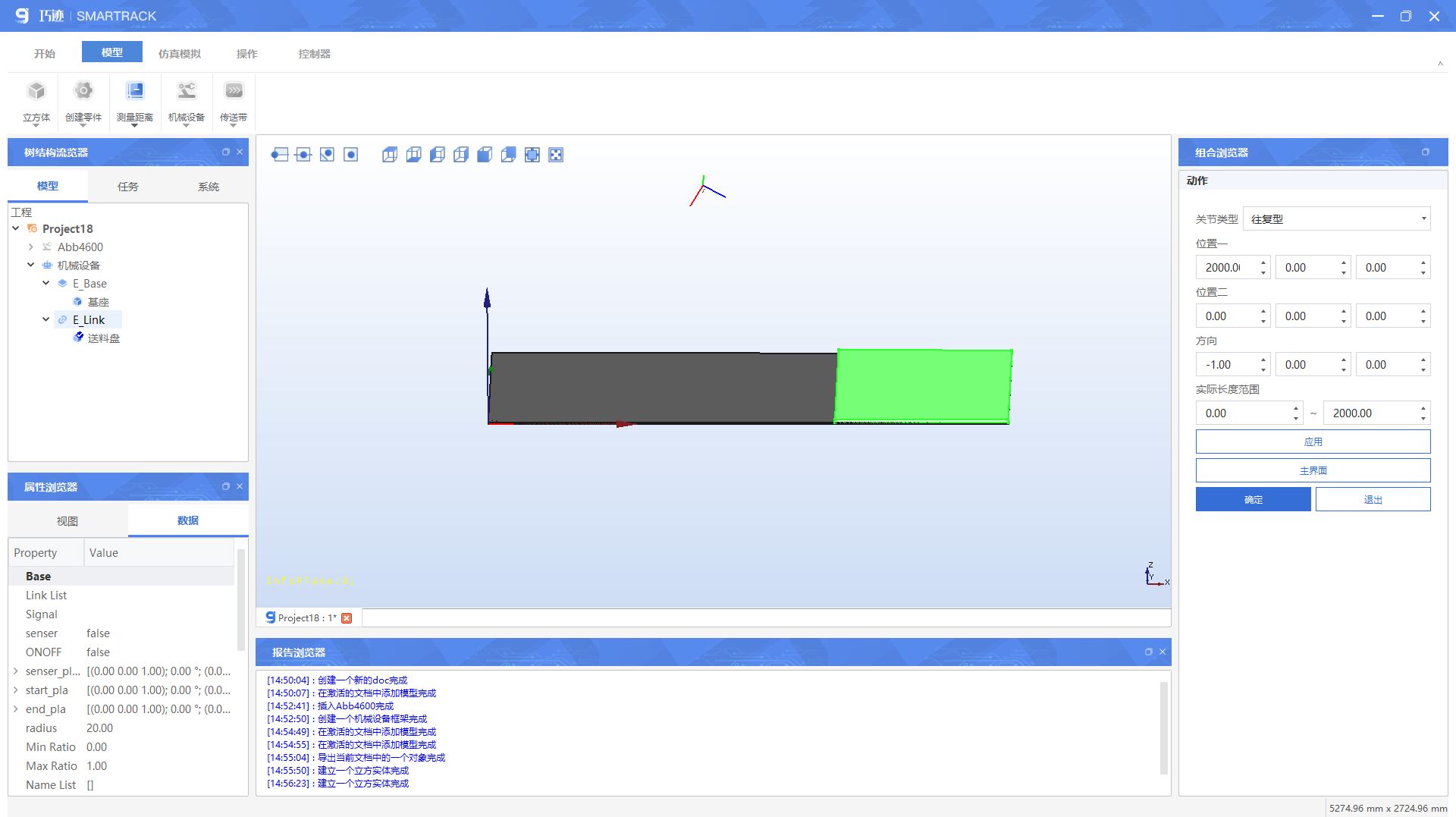
打开后,对机械设备进行参数设置。如图4-51。
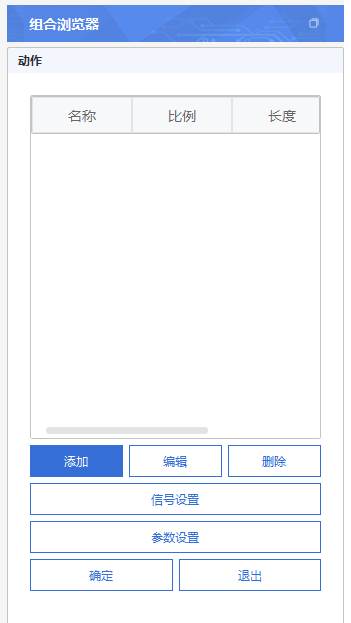
点击,参数设置,设定机械设备运动区域。如图4-52。
第一个位置:移动关节起点位置
第二个位置:移动关节中点位置
通过2个位置,确定往复关节的总运动范围。
如果移动关节从原点开始运动,默认起点为0,只需要配置第一个位置即可。
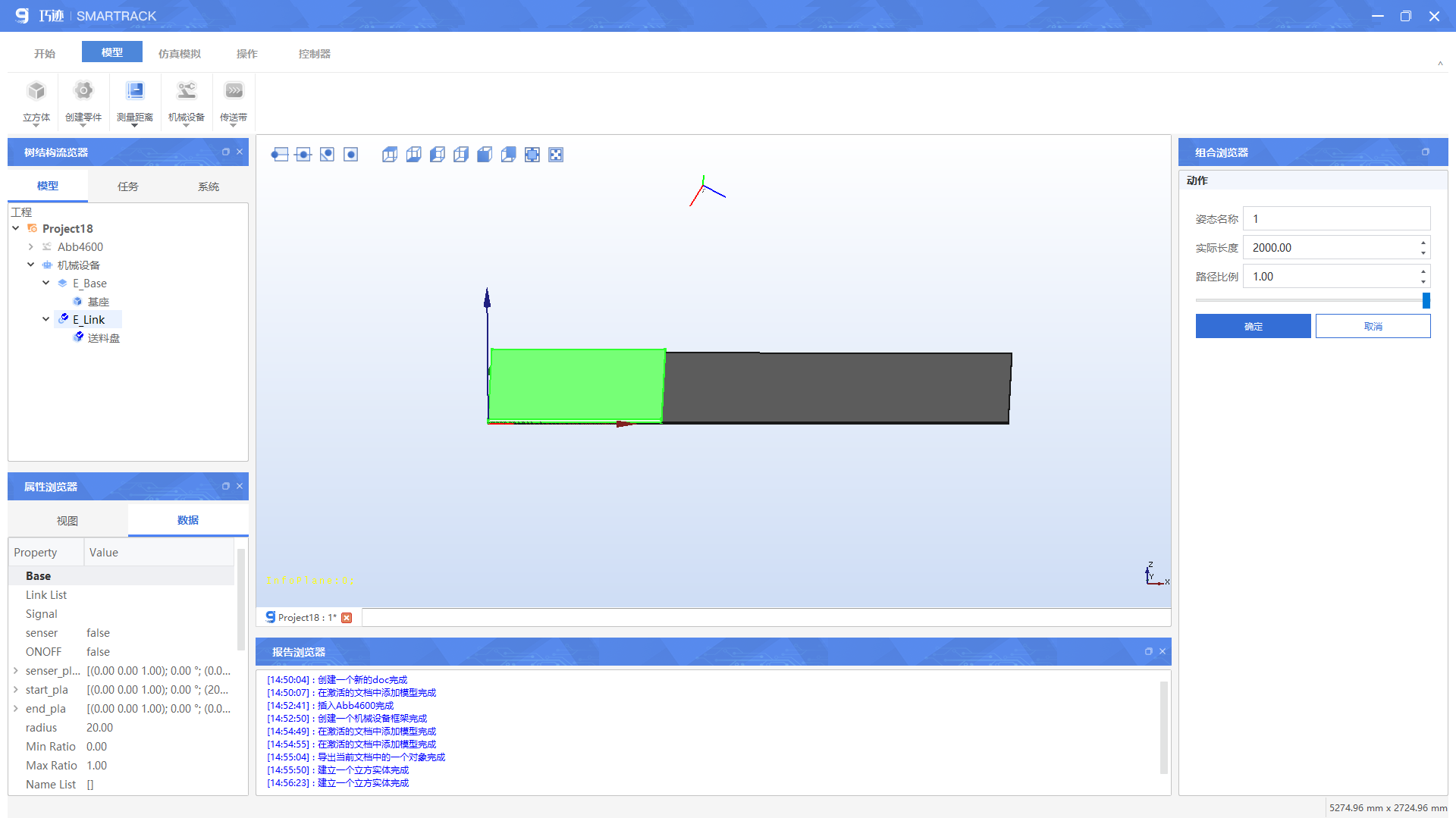
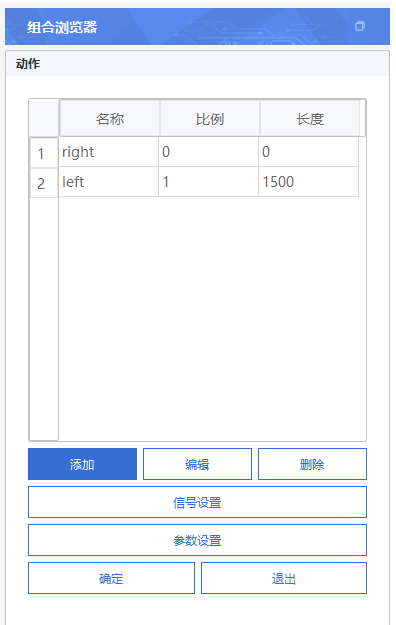
点击应用,返回主页面,进行动作设置,点击添加动作,进行动作参数配置。
添加第一个位置,如图4-53。
添加第二个位置,如图4-54。
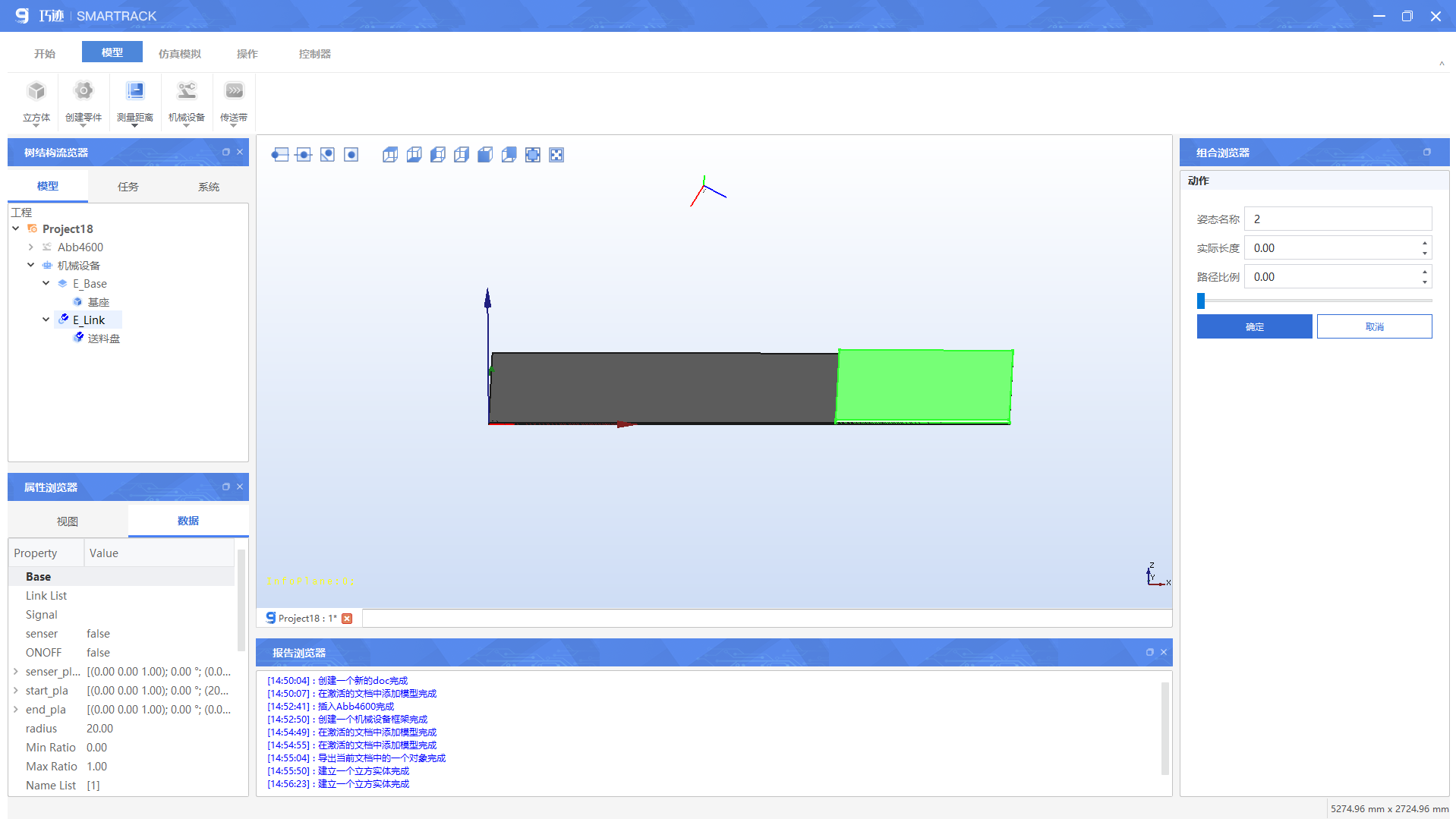
添加动作后,动作列表显示机械设备所有姿态。如图4-55。
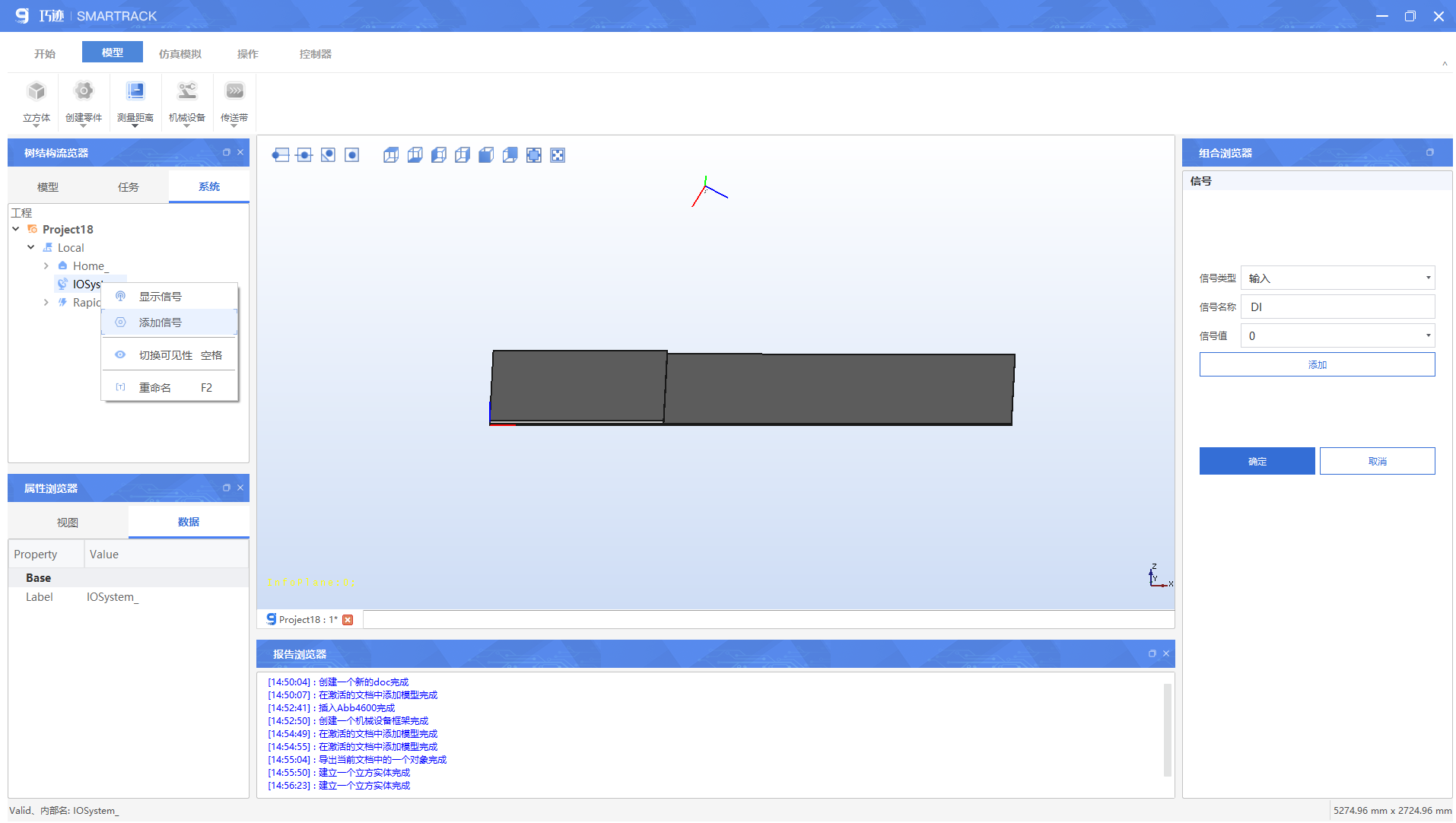
插入一个机器人添加控制信号,如果没有机器人是无法添加信号的 。插入机器人>树结构-系统>IOSystem>添加信号。如图4-56。
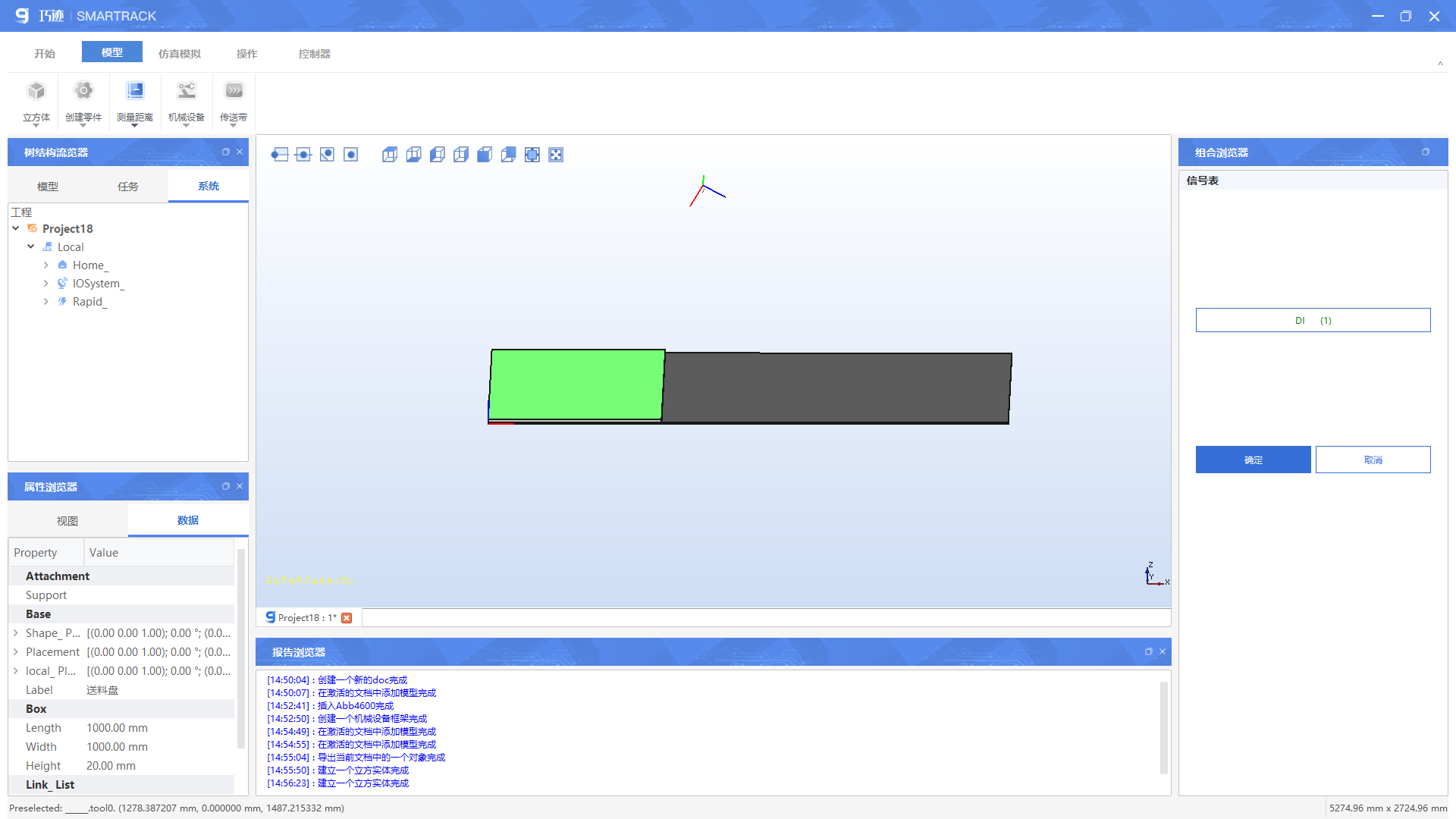
添加信号成功后,进行姿态和数字信号的绑定。如图4-57。

点击树结构-系统>右击IOsystem>显示信号,可对设备进行信号控制,点击相应数字信号,可改变信号值。如图4-58。

如果想实现夹爪抓取物体,需要设置传感器,并添加传感器开启信号、传感器输出信号、抓取的物体。如图4-59。
需了解夹爪抓取物体,可查看第五章详细例子。
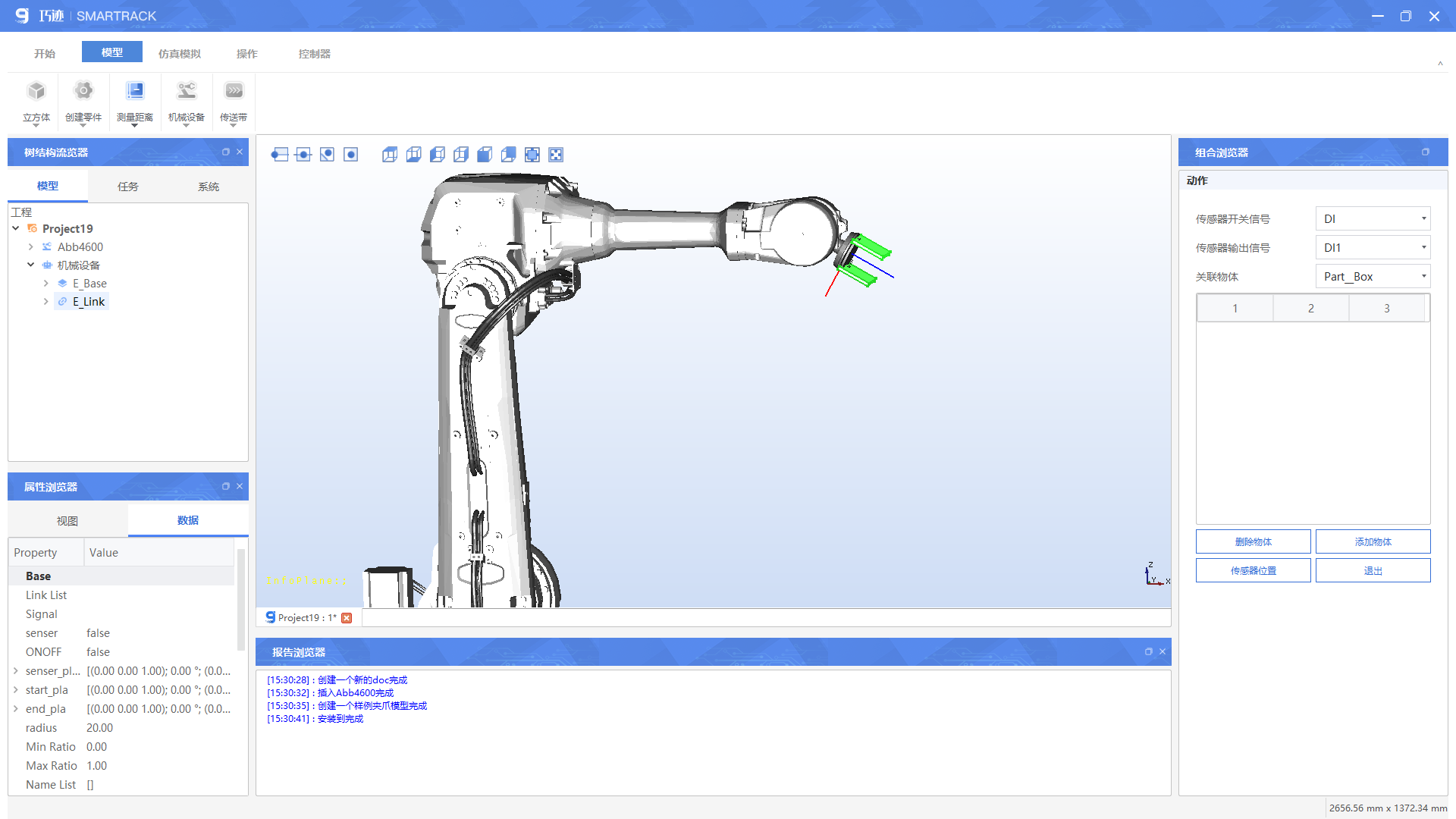
设置传感器位置及感应半径,当传感器半径检测到物体,才能实现抓取物体。如图4-60。
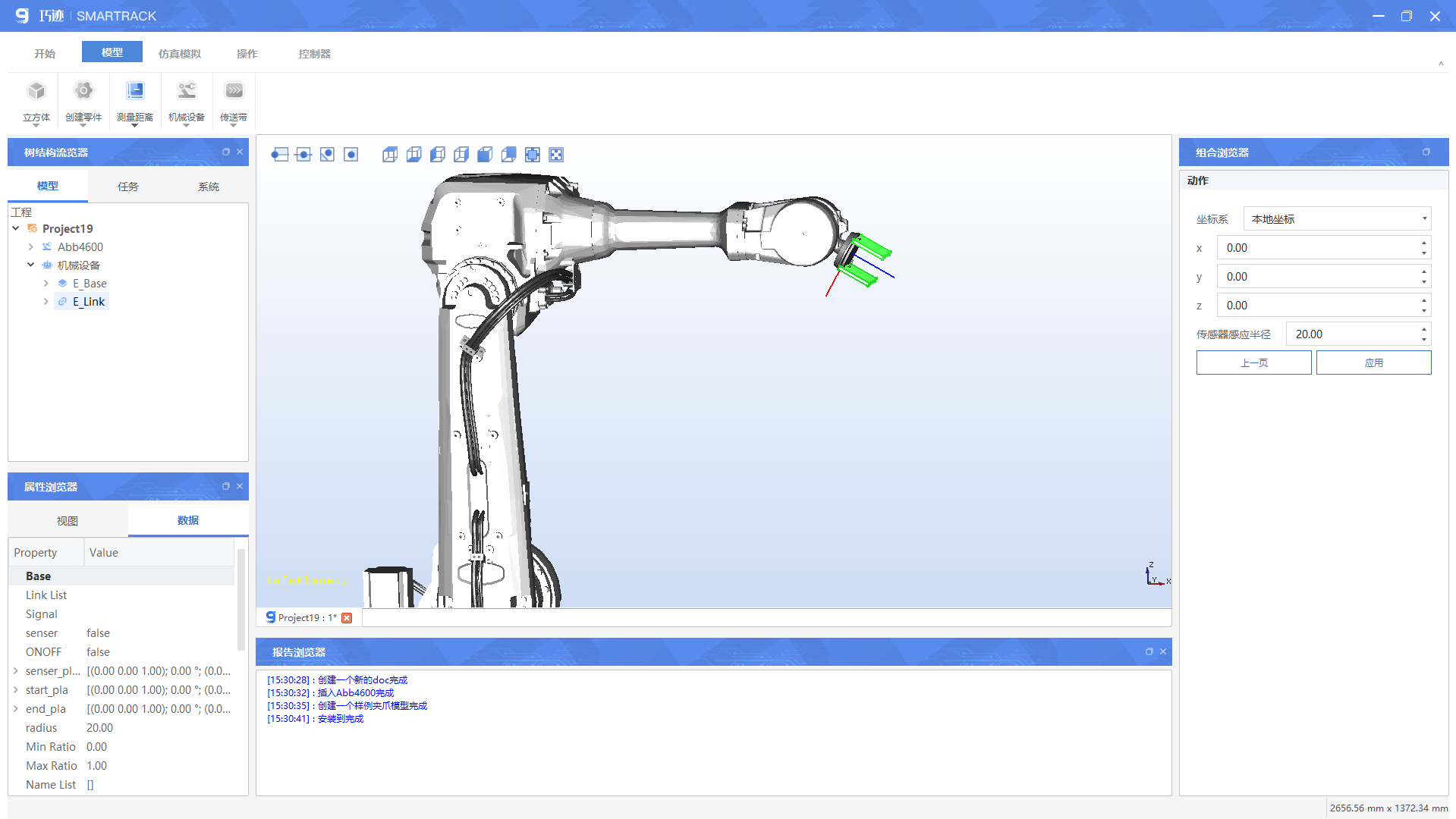
最后在轨迹里创建逻辑点,实现物体抓取并带走物体。
4.24 传送带
点击“传送带”,树结构-模型新增一个传送带节点,拖动相应模型,可以至传送带节点内,作为一个传送带。软件内置了一个样例传送带,添加样例传送带后。如图4-61显示。
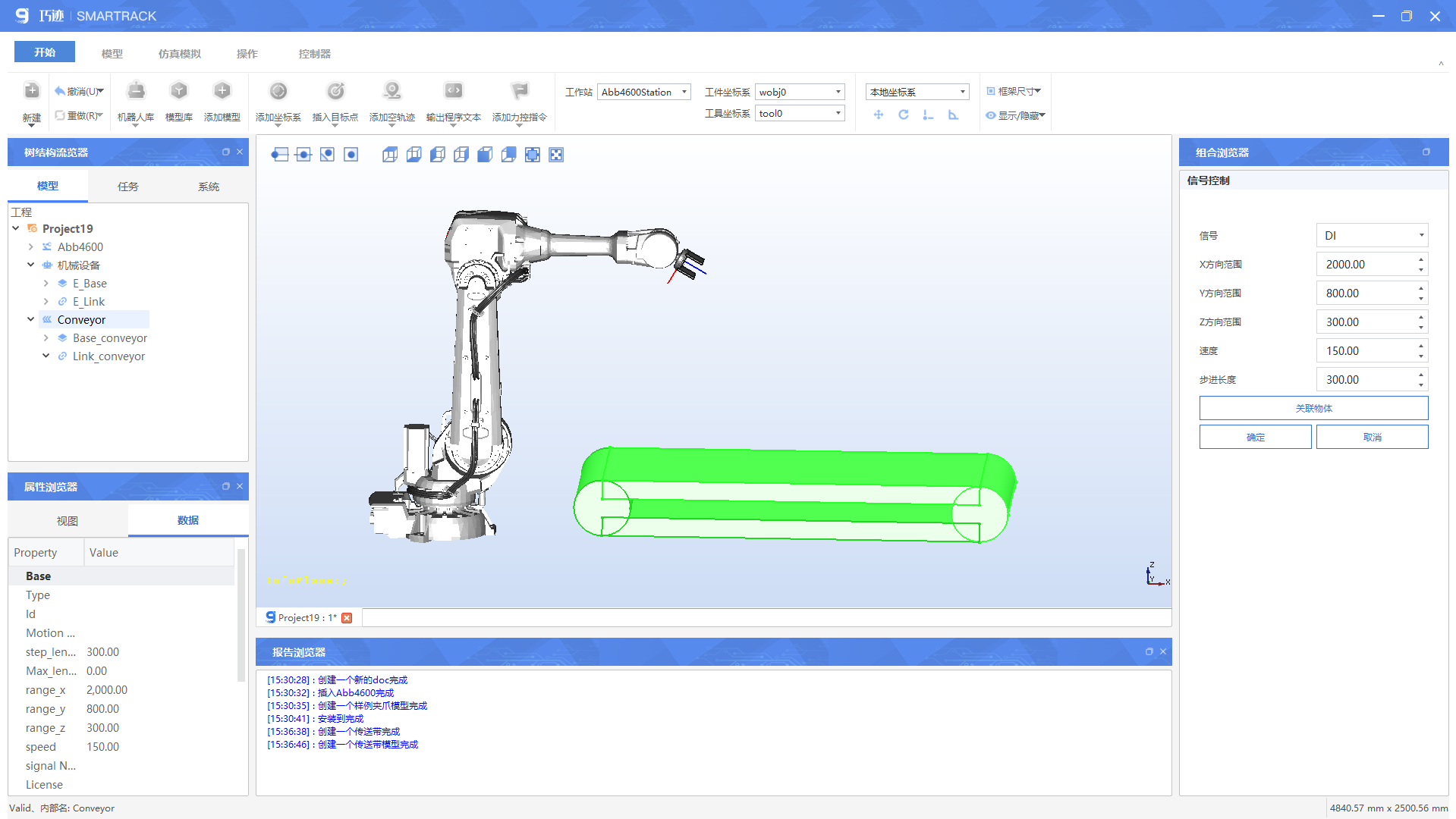
传送带默认以X方向进行运动,设置传送带信号、范围、速度、步长,绑定传送带传送对象,在轨迹中创建好逻辑点,在仿真界面,可实现传送带仿真动画。
了解传送带具体操作,可查看第五章详细例子。
4.25 碰撞矩阵
点击“碰撞矩阵”,树结构新增碰撞对,将需要检测的对象分别拖入进A\B两个碰撞检测组,仿真运行,即可进行检测。如图4-62所示。

4.26 仿真
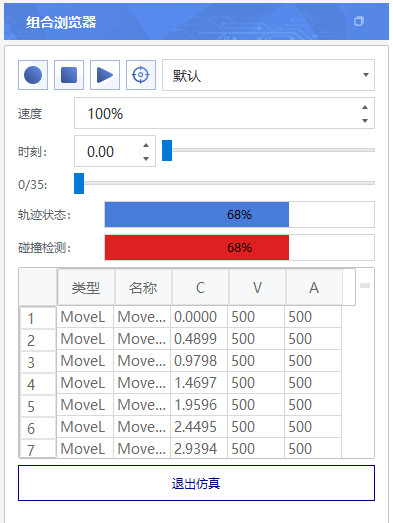
点击“仿真”,选择某条轨迹进行仿真。如图4-63所示。

可对仿真动画进行暂停、停止、播放、速度等进行控制。如图4-64所示。
4.27 实况
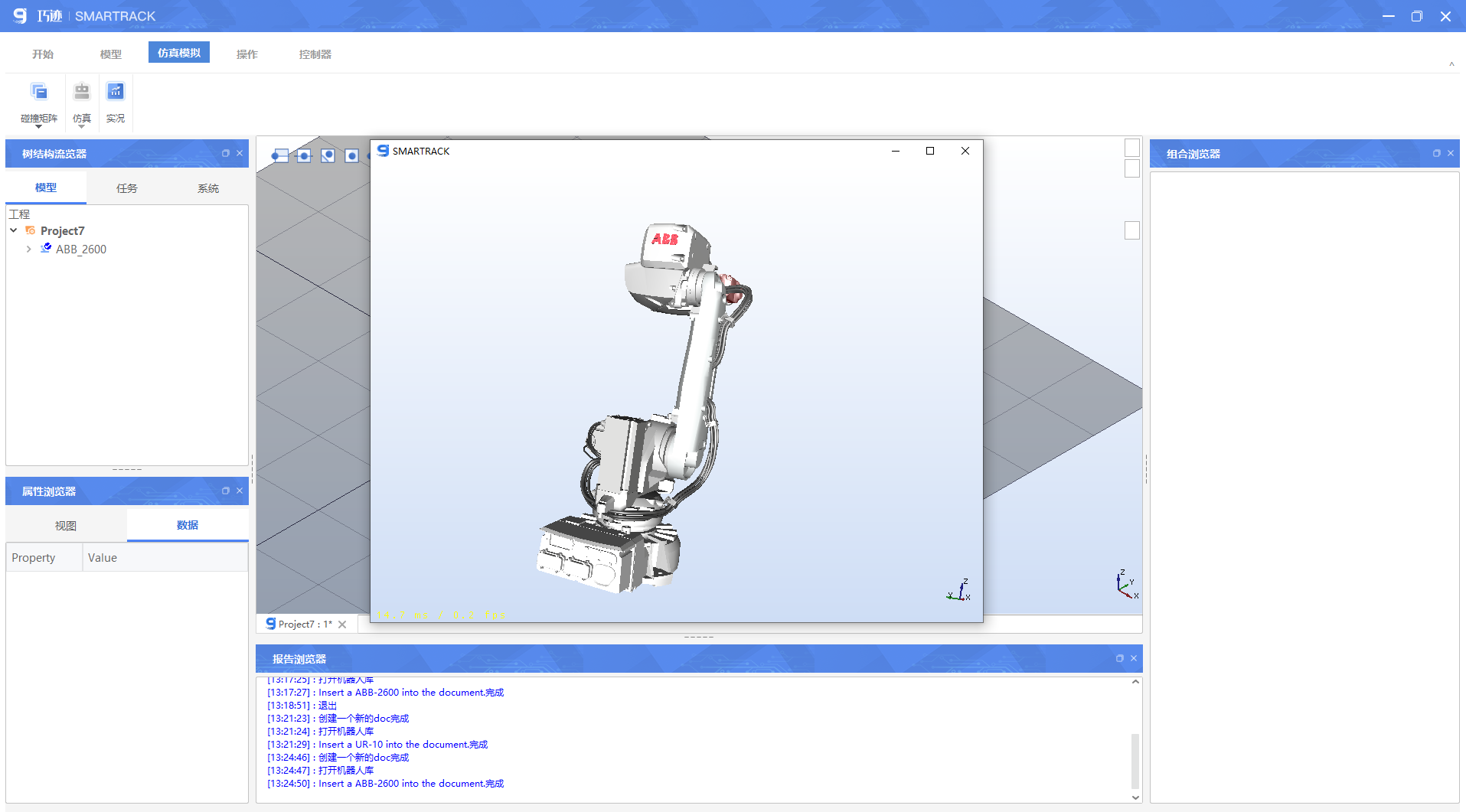
实况功能默认置灰不可点击,当机器人和控制柜通讯连接成功,则会激活高亮该按钮,点击实况,会打开实况窗口,可以实时反馈真机在场景中是如何运动的。如图4-65所示
4.28 新建几何
点击“新建几何”,组合浏览器打开新建几何对话框,如图4-66所示。

名称:可自定义名称。
工件坐标:可根据需求自行选择。
设置类型,可选择:Edge Curve、Intersection。
4.26.1 Edge Curve
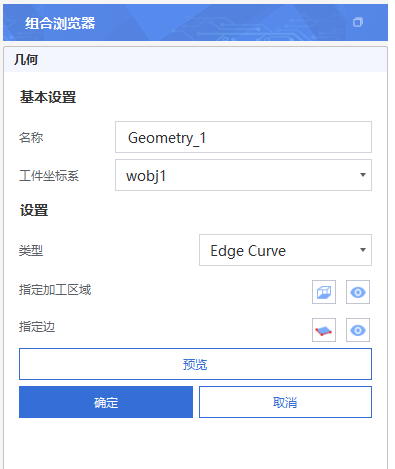
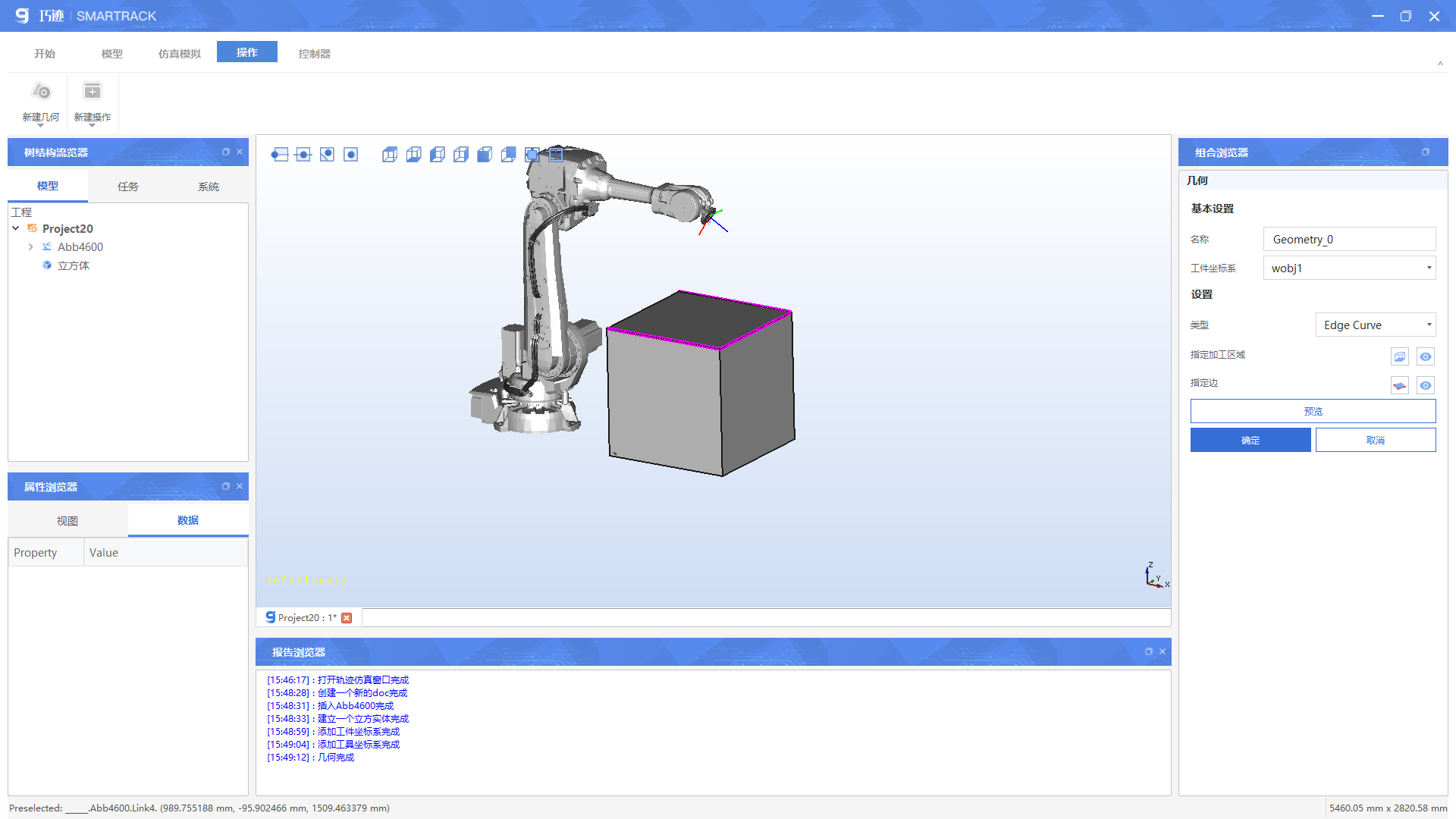
当选择Edge Curve时,组合浏览器打开对话框。如图4-67所示。
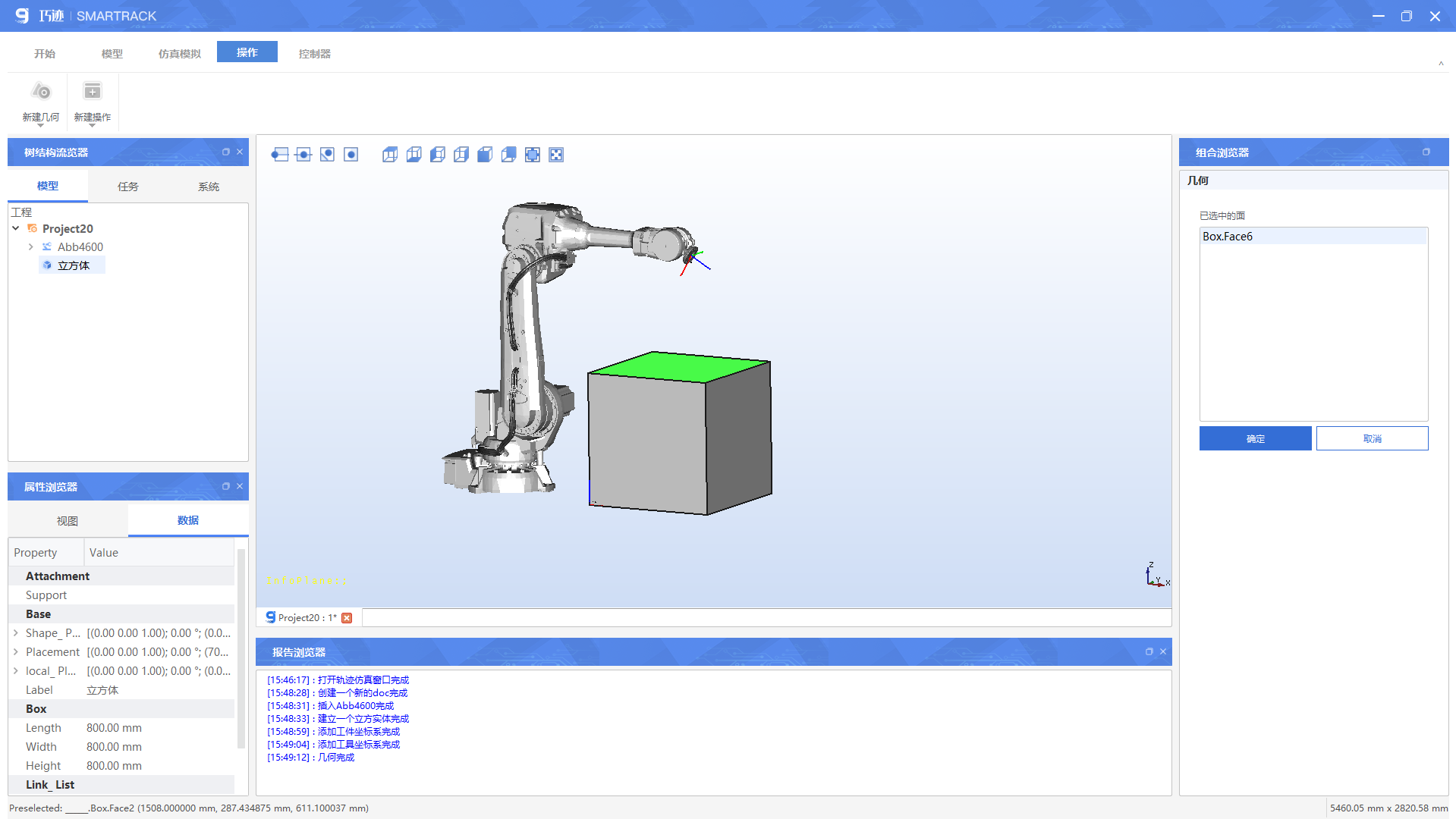
可在图形视窗,点击指定加工区域,选择需要加工工件的面,选择好加工面后,组合浏览器-已选中的面会显示当前选择的所有面。如图4-68所示。
删除某个加工区域,右键点击,即可点击删除。如图4-69。

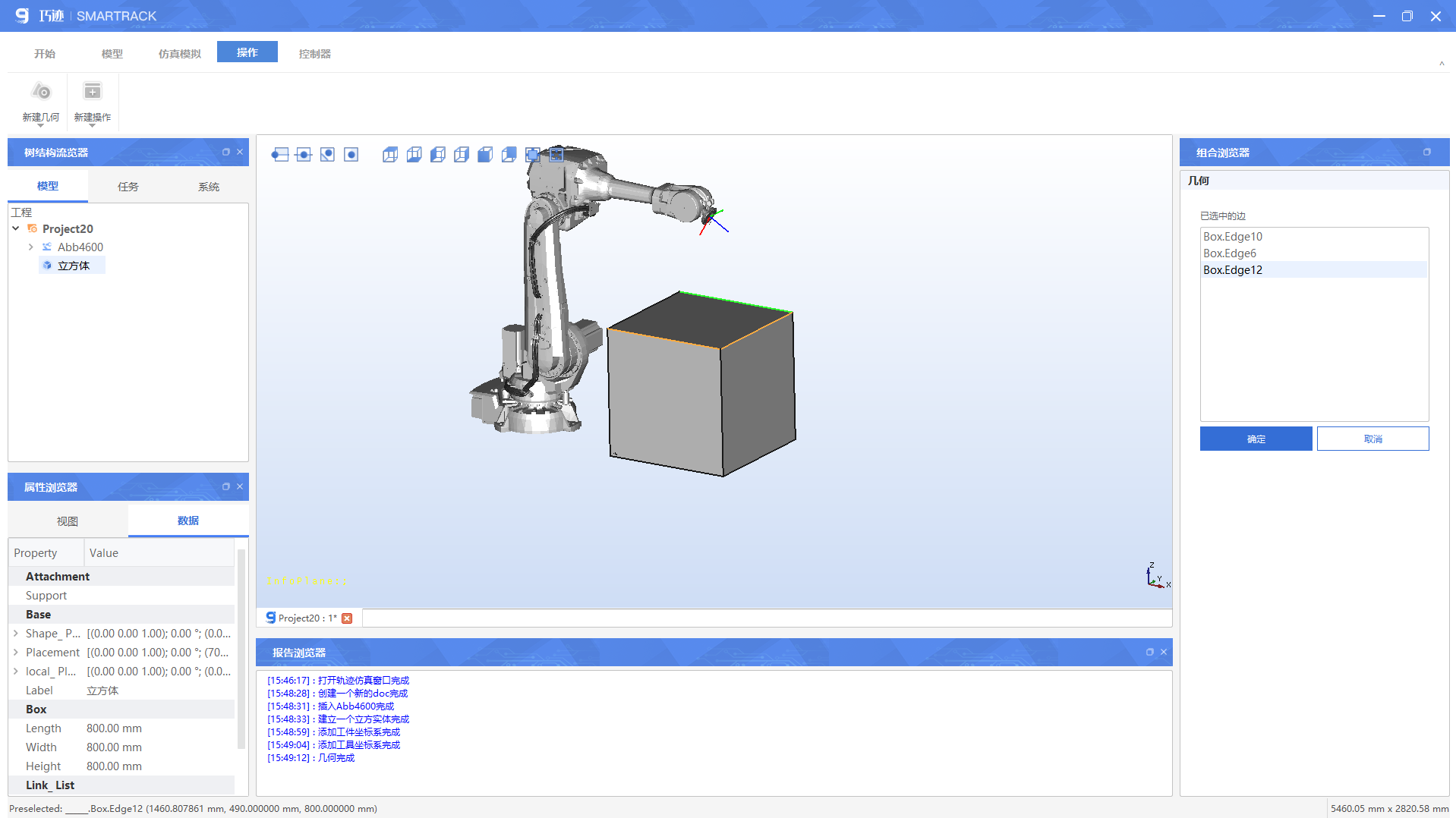
点击“指定边”,组合浏览器打开对话框,可在图形视窗点击选择需要加工区域面上的边,选择好加工边,组合浏览器-已选中的边,会显示当前选择的所有边。如图4-70所示。
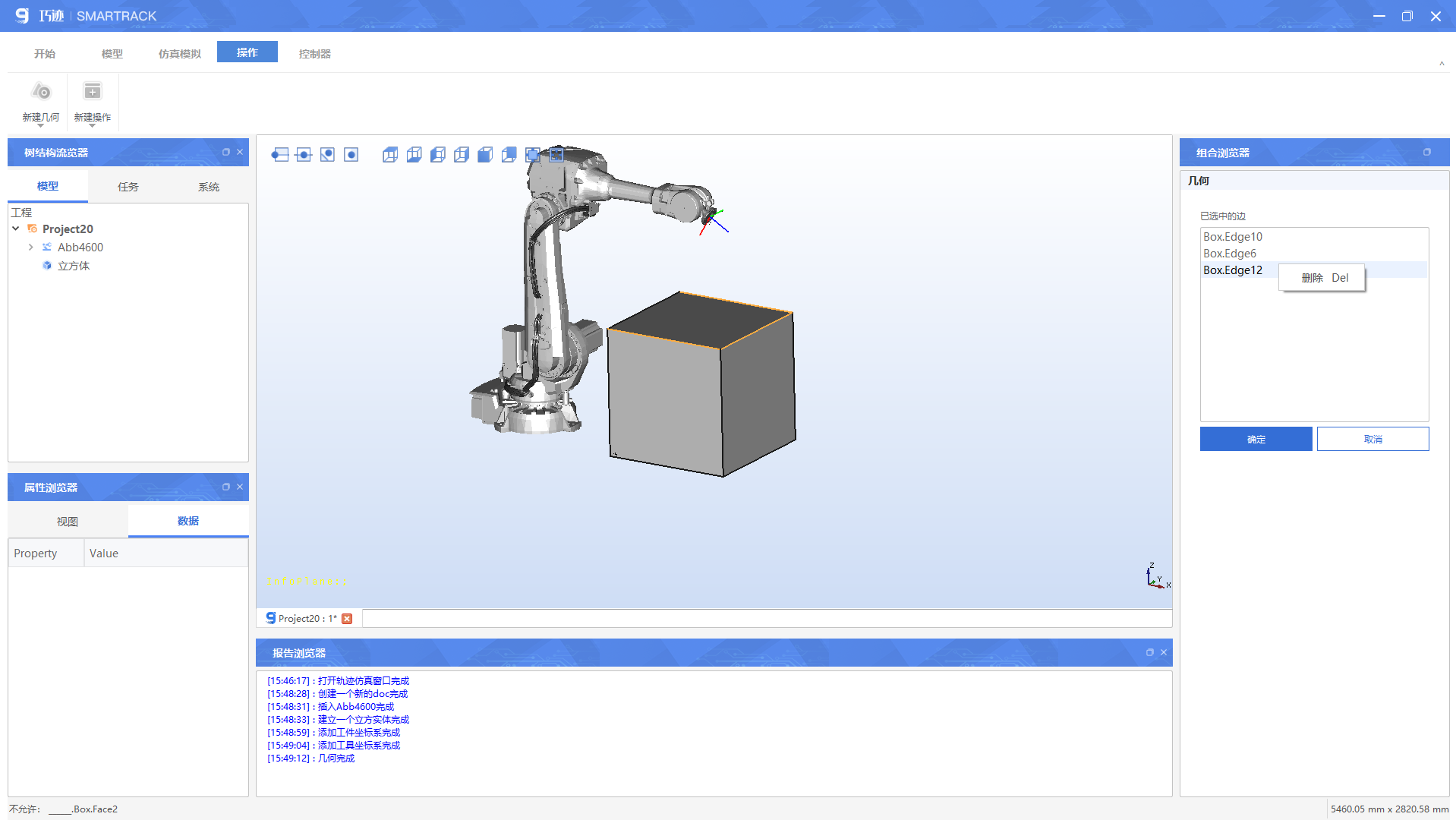
如果需要取消某个选中的边,可鼠标右键点击进行删除,如图4-71所示。
点击预览,可在视图窗口查看当前选择的加工区域。如图4-72所示。
点击“确定”,树结构浏览器-模型中新增一个几何节点。如图4-73。
4.26.2 Intersection
当选择Intersection时,点击“指定加工区”,同Edge Curve。
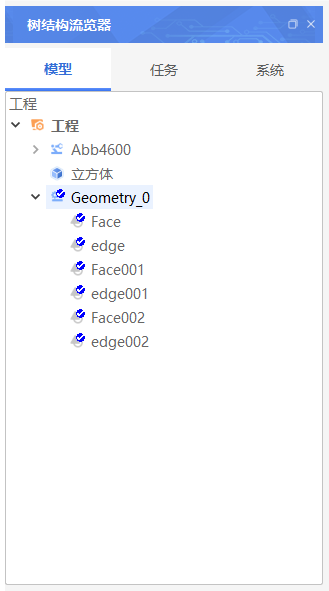
点击“指定切割平面”,组合浏览器打开对话框,如图4-74所示。可对引导面进行切换,位置调整,角度调整,双边切割设置、切割数量设置、切割距离设置。
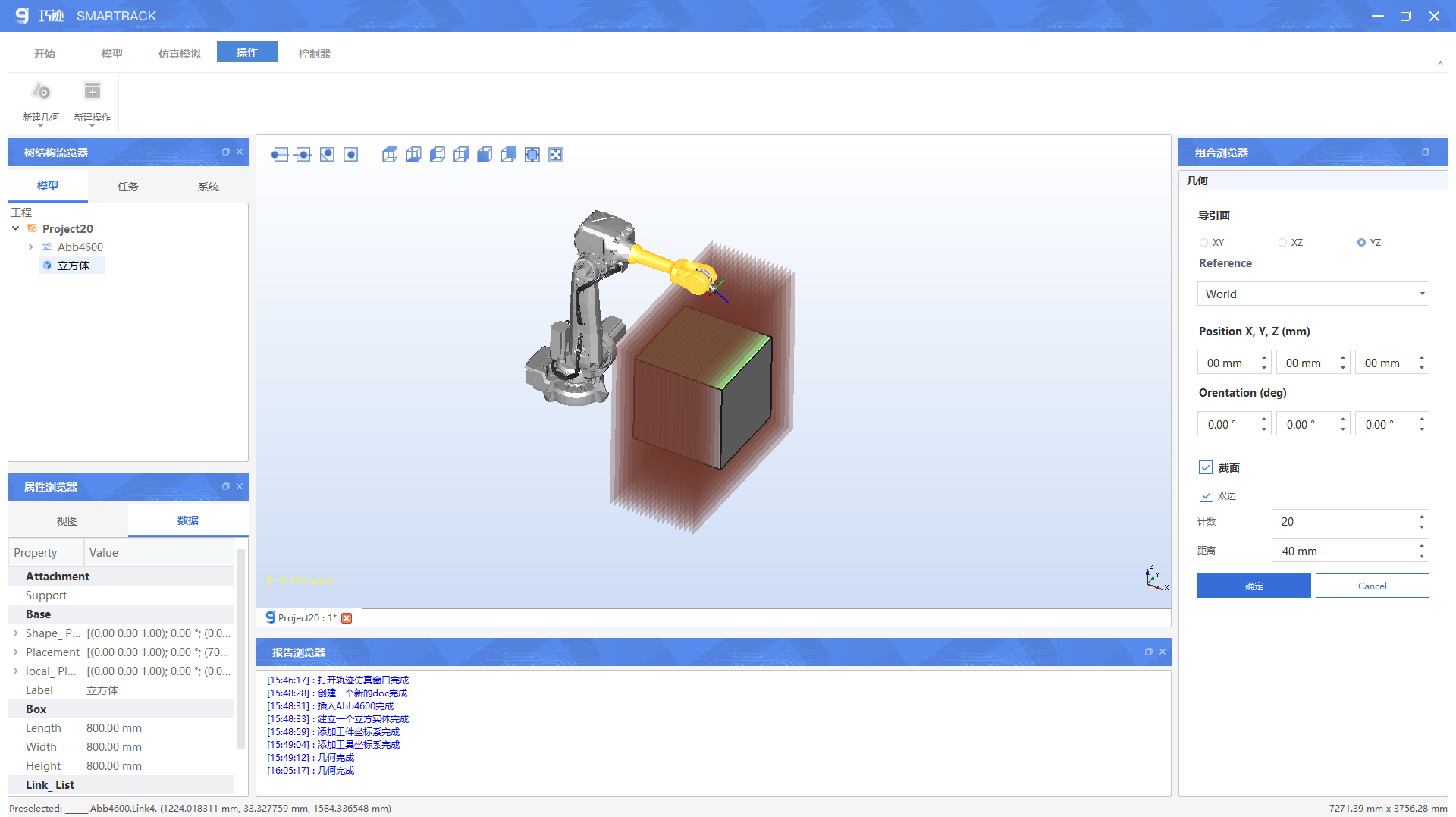
点击预览,可在视图窗口查看当前实际加工区域。如图4-75所示。
4.29 新建工具
点击新建工具,组合浏览器打开相应对话框,名称可自定义,绑定的工具坐标系,类型可选:none、T-cutter。如图4-76所示。
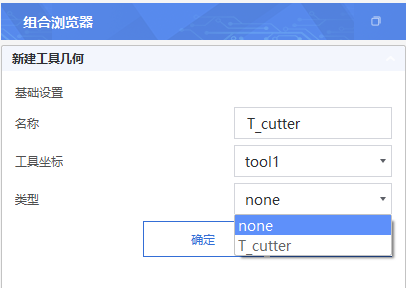
选择T-cutter,显示T-Cutter参数设置页面,如图4-77所示。

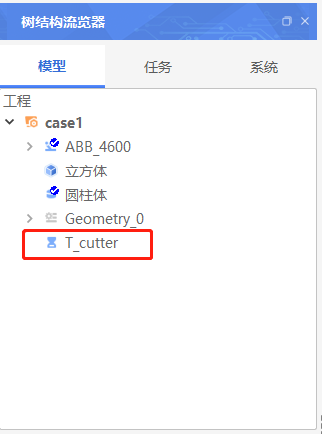
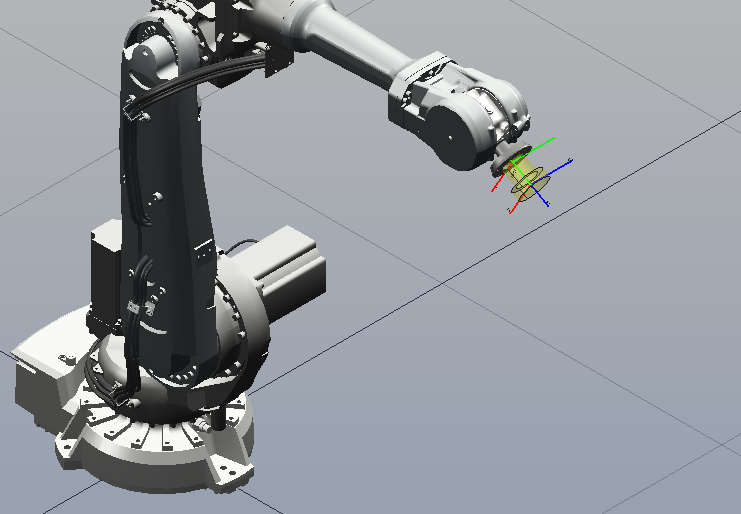
点击取消,关闭对话框,不创建工具。点击确定,创建工具成功。树节点新增一个工具几何节点,3D视窗中显示创建的工具几何体,如图4-78所示。
4.30 新建操作
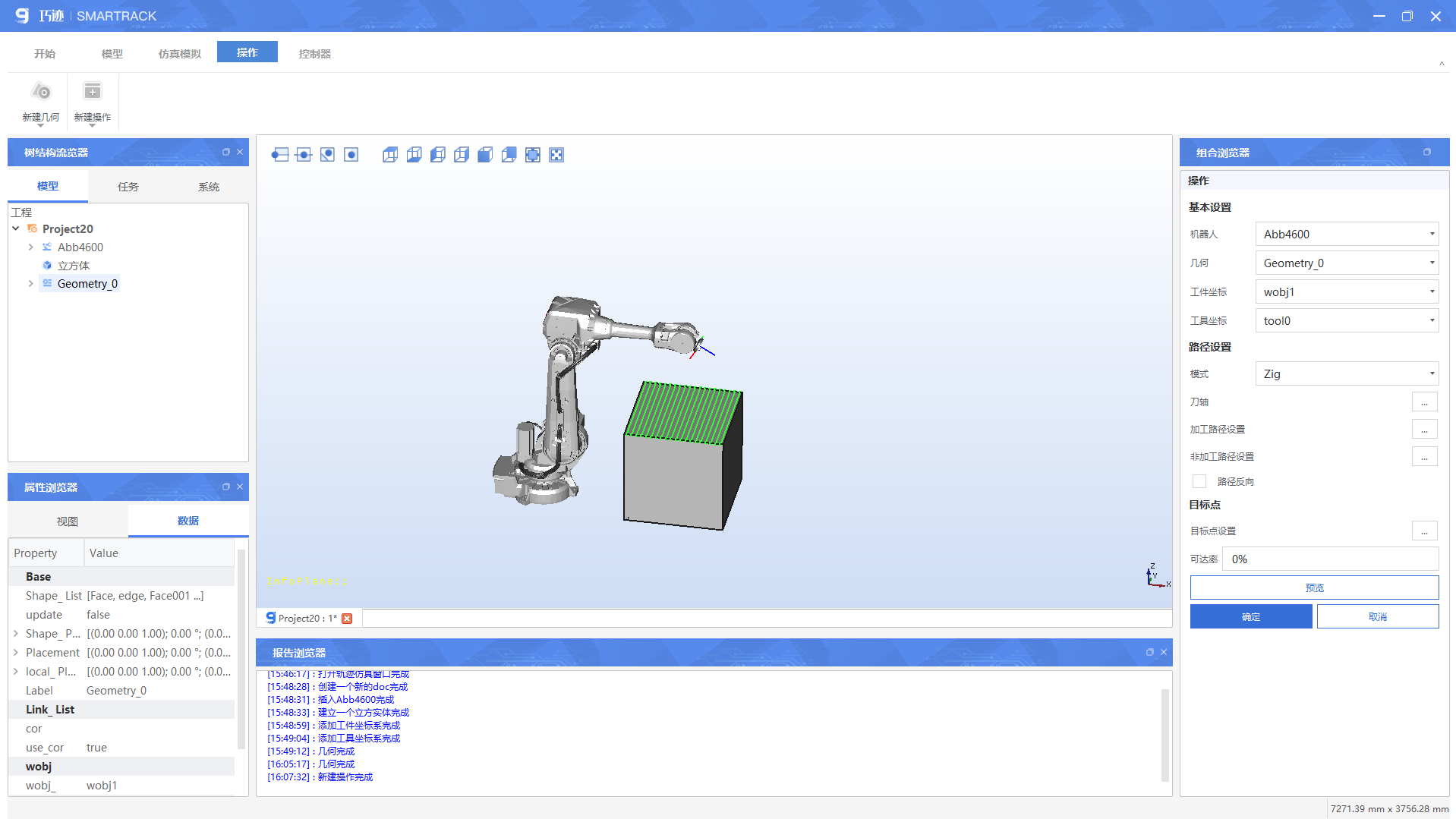
点击“新建操作”,组合浏览器打开相应对话框。选择相应的加工几何,相应的工件坐标和工具、路径设置及目标点设置。如图4-79所示。
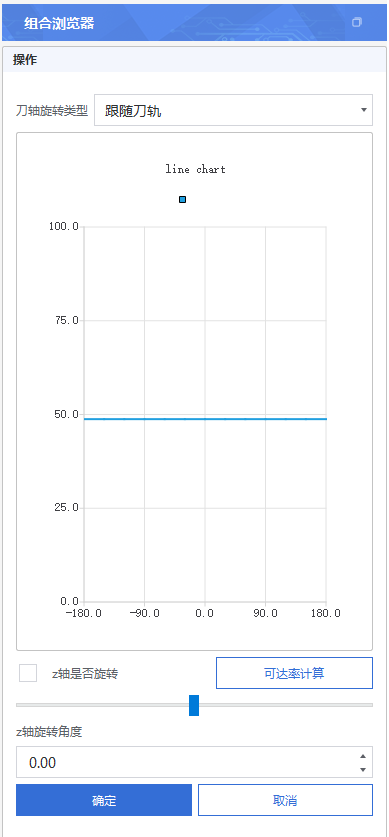
可设置刀轴类型及刀轴角度,如图4-80所示。

可对加工路径进行差补设置,如图4-81所示。

可对非加工路径进行设置,如图4-82所示。

可对目标点进行设置,并计算目标点可达率。如图4-83。
4.31 SVG生成路径
插入机器人后,点击SVG,组合浏览器打开对话框人,如图4-84所示。

选择SVG图片后,点击预览,即可在3D视窗生成相应的路径,并计算可达率,用户可通过调整目标点位坐标进行设置,直到可达率100%。
4.32 建立连接
对应不同的机器人,有不同的连接方式。1.2.0版本支持ABB机器人和UR机器人通讯。
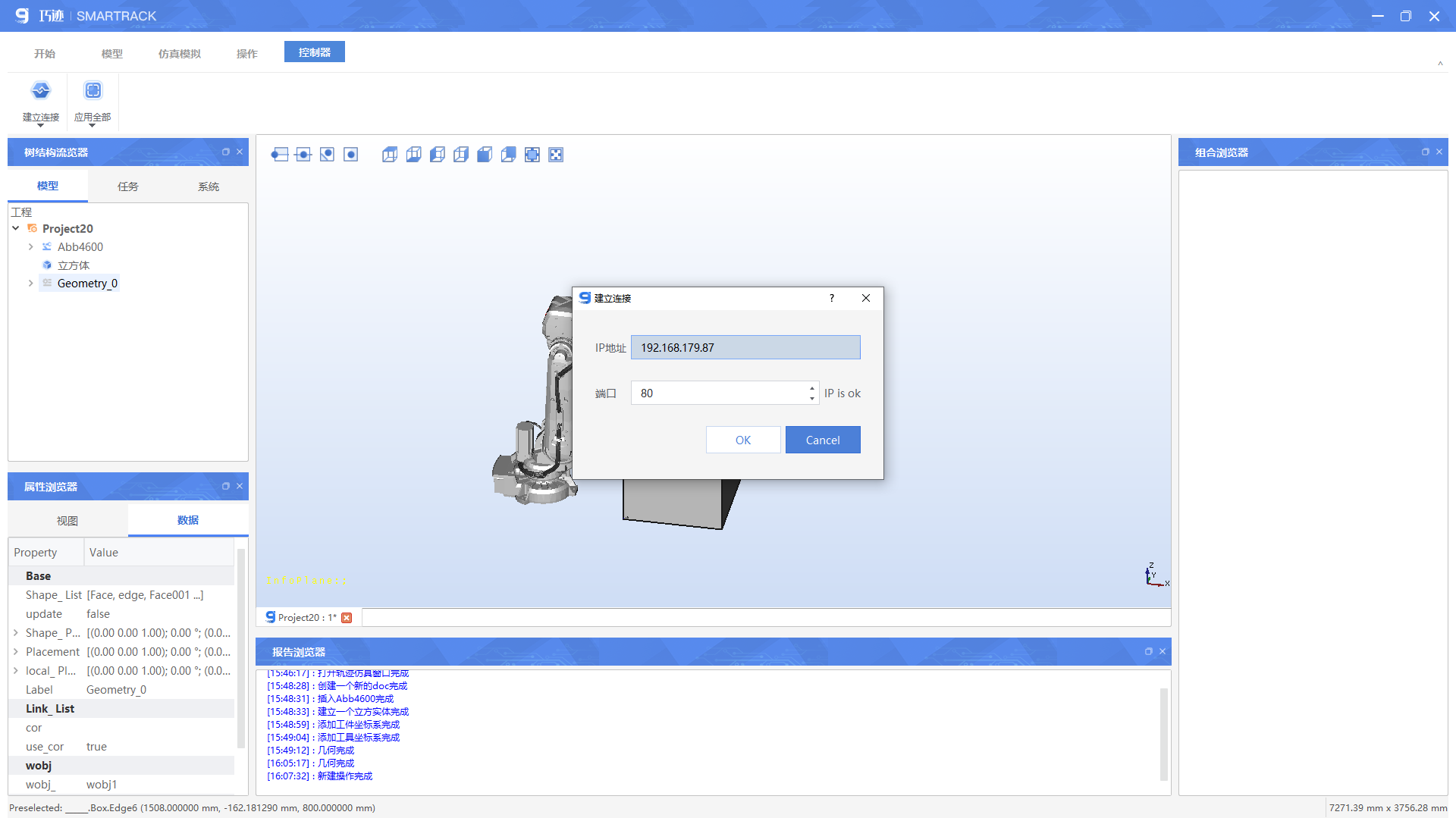
ABB机器人,点击“建立连接”,可设置机器人相应ip地址及端口进行连接。如图4-85所示。
UR机器人,点击“建立连接”,可设置机器人相应ip地址、端口号、username、password进行连接。如图4-86所示。

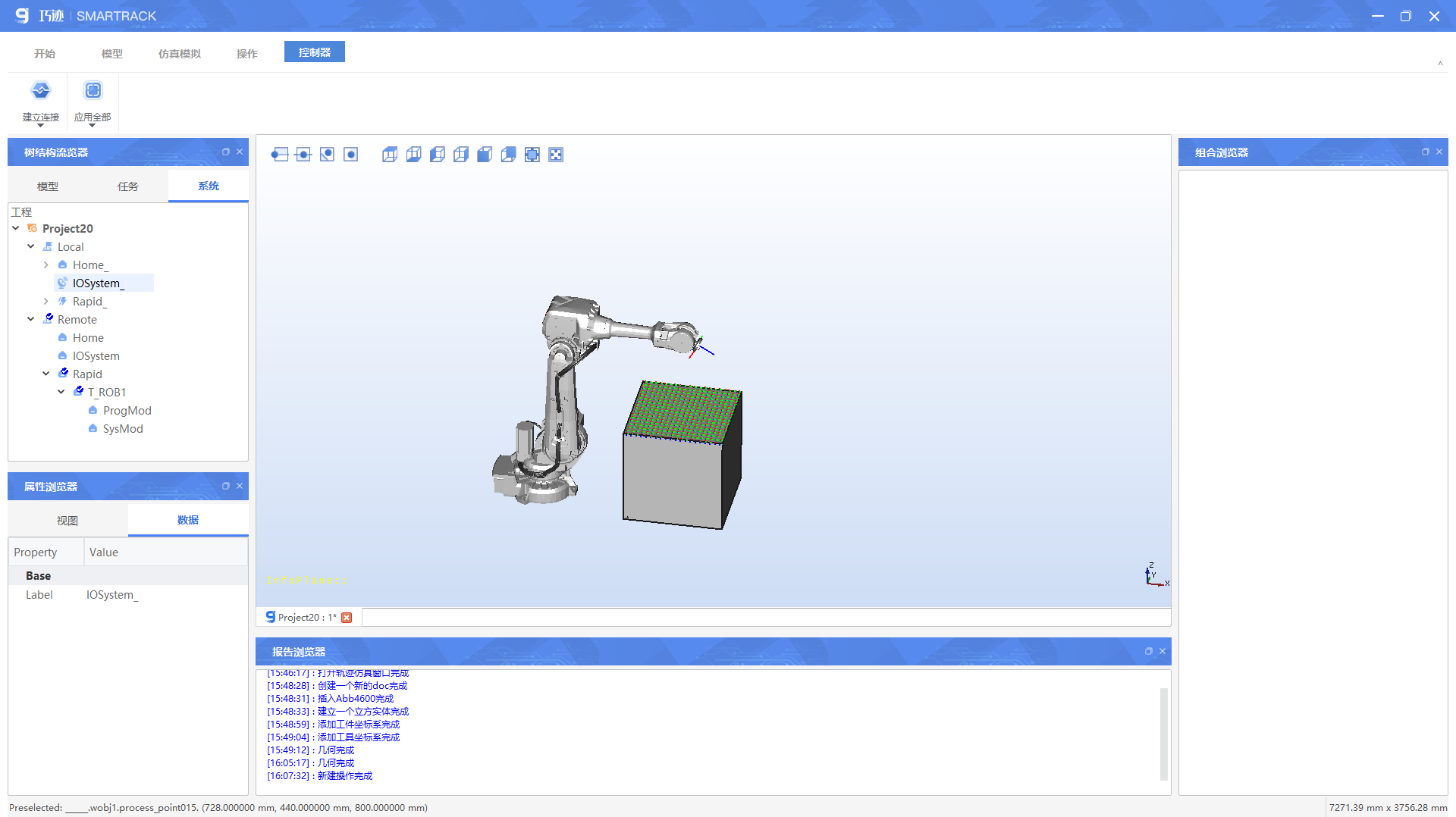
连接成功后,树结构浏览器-系统,读取机器人控制器中的程序文本。如图4-87所示。
4.33 应用全部
点击“应用全部”,可将本地编辑后的程序文本,应用到机器人控制器。
4.34 Python 脚本编程
点击创建Python脚本,树结构-系统,新增python文本编辑节点,右键点击编辑,可以创建python脚本
指令集
4.34.1 机器人初始化指令Robot('robot_name','pyfile_name')
@robot_name 机器人名称
@pyfile_name python脚本文件名
例:R1=Robot('R1','Py_Prog')
4.34.2 获取工具坐标R1.getTool('tool_name')
@tool_name软件中的工具坐标名
例:R1.getTool('tool0') #该方法在Robot类中,需要先初始化Robot类
4.34.3 获取工件坐标R1.getTool('wobj_name')
@wobj_name软件中的工件坐标名
例:R1.getWobj('wobj0') #该方法在Robot类中,需要先初始化Robot类
4.34.4 设置工具坐标tool1=tooldata('tool_name',frame,robothold)
@tool_name 工具坐标名
@frame 工具坐标位姿,四元数表示【x,y,z,w,i,j,k】
@robothold 是否绑定机器人末端
例 :tool1=tooldata('tool1',[0,0,100,1,0,0,0],True)
4.34.5 设置工件坐标wobj1=wobjdata('wobj_name',frame,robothold)
@tool_name 工件坐标名
@frame 工件坐标位姿,四元数表示【x,y,z,w,i,j,k】
@robothold 是否绑定机器人末端
例 :wobj1=wobjdata('wobj1',[500,0,500,1,0,0,0],False)
4.34.6 空间点设置p1=posedata('pose_name',frame)
@pose_name
@frame 空间点坐标位姿,四元数表示【x,y,z,w,i,j,k】
例:p1=posedata('p1',[0,0,100,1,0,0,0])
4.34.7 运动指令MoveL #R1.MoveL(posedata,vel,zone,tooldata,wobjdata)
@posedata 空间点类型,需要先设置该空间点
@vel 运行速度
@zone 转弯半径
@tooldata 工具坐标类型,需要先设置工具坐标
@wobjdata 工件坐标类型,需要先设置工件坐标
例:R1.MoveL(p1,500,0,tool1,wobj1)
4.34.8 运动指令MoveJ #R1.MoveJ(posedata,vel,zone)
@posedata 空间点类型,需要先设置该空间点
@vel 运行速度
@zone 转弯半径
例:R1.MoveJ(p1,500,0)
4.34.9 例:简易正方形运动程序
#created by SMARTRACK : #init Robot from RobotProg import* R1=Robot('R1','Py_Prog') R1.getTool('tool0') R1.getWobj('wobj0') #init Robot #sample tool1=tooldata('tool1',[0,0,100,1,0,0,0],True) wobj1=wobjdata('wobj1',[500,0,500,1,0,0,0],False) p1=posedata('p1',[0,0,100,1,0,0,0]) p2=posedata('p2',[100,0,100,1,0,0,0]) p3=posedata('p3',[100,0,0,1,0,0,0]) p4=posedata('p4',[0,0,0,1,0,0,0]) R1.MoveL(p1,500,0,tool1,wobj1) R1.MoveL(p2,500,0,tool1,wobj1) R1.MoveL(p3,500,0,tool1,wobj1) R1.MoveL(p4,500,0,tool1,wobj1) R1.MoveL(p1,500,0,tool1,wobj1) #sample
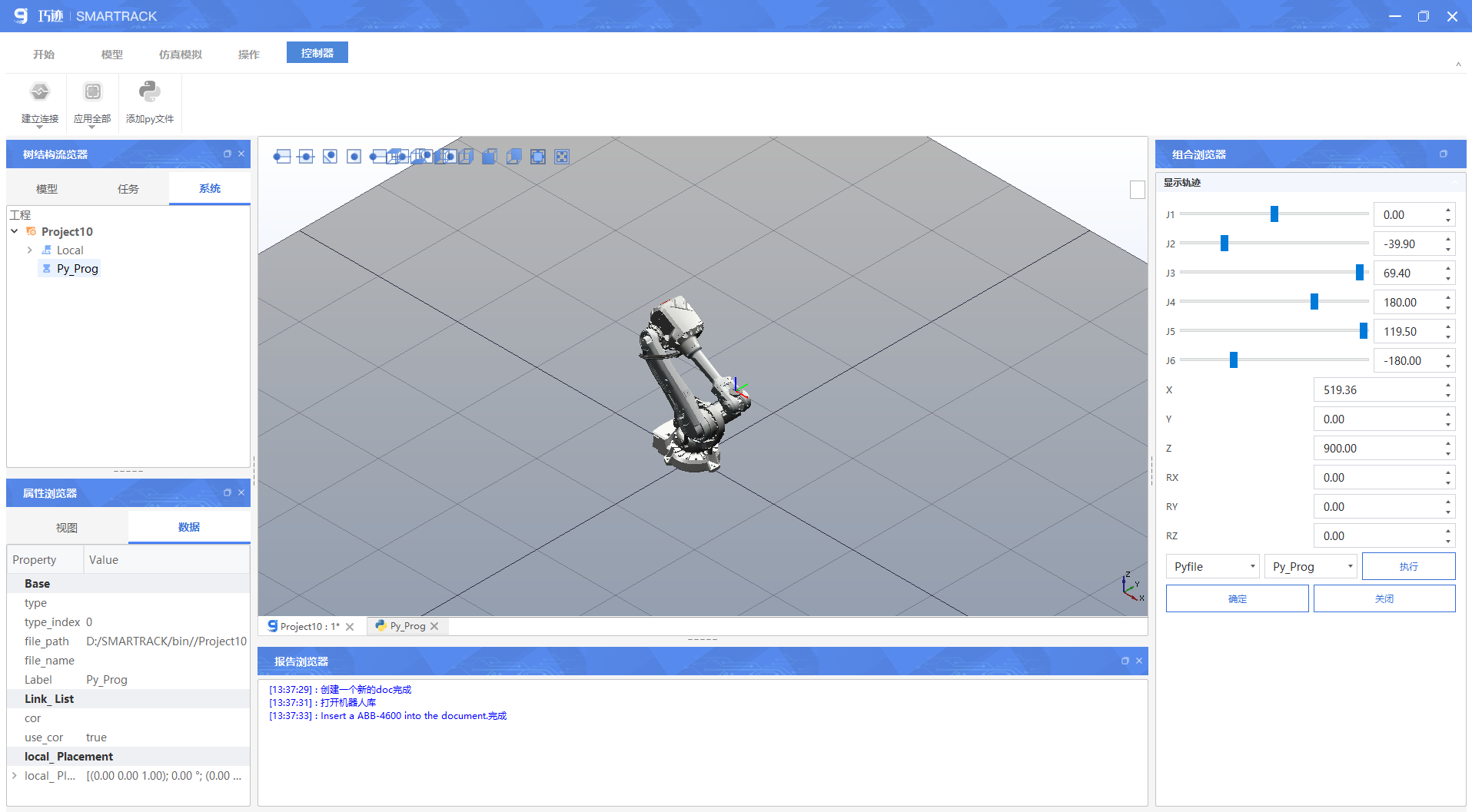
Python脚本节点右击,点击执行,切换至3D视窗,并打开python脚本执行对话框,点击执行,3D视窗实现机器人运动仿真。如果4-88所示。
4.35 巧迹语言编程
在工作站中插入一个需要生成后置程序的机器人,点击控制器模块的“添加程序文件”

右击prog-mod,选择生成后置程序,即可生成相应机器人的后置程序

4.35.1 巧迹语言
巧迹语言
巧迹语言是内部表示机器人信息的语言,巧迹语言是rapid语言的一个子集,使用rapid语言解析器可完全解析巧迹语言。部分地方对rapid语言进行了简化,以下列出:
数据
wobjdata
VAR wobjdata wobj := [[x, y, z, w, i, j, k], false];
工件坐标系,由一个七元数组与bool值组成的数组,七元数组为工件坐标系在空间中的姿态,由空间坐标与四元数组成;bool值表示是否使用该工件坐标系
tooldata
VAR tooldata tool := [[x, y, z, w, i, j, k], false];
工具坐标系,由一个七元数组与bool值组成的数组,七元数组为工件坐标系在空间中的姿态,由空间坐标与四元数组成;bool值表示是否使用该工具坐标系
posedata
VAR posedata p := [x, y, z, w, i, j, k];
该类型表示机器人在空间中的姿态,由空间坐标与四元数组成
axisdata
VAR axisdata a := [j1, j2, j3, j4, j5, j6];
机器人的六个轴角
指令
MoveJ
MoveJ axisdata, speeddata, 0, tooldata, wobjdata;
# 参数
axisdata 轴角位置
tooldata 工具坐标系
wobjdata 工件坐标系
speeddata 速度
0 zone?
机器人轴运动指令。
MoveL
MoveL posedata, speeddata, 0, tooldata, wobjdata;
# 参数
posedata 点空间位姿
tooldata 工具坐标系
wobjdata 工件坐标系
speeddata 速度
机器人线性运动指令。
变量声明
VAR <type> <variable> ;
VAR <type> <variable> := <expression> ;
变量由变量声明引入,在声明的变量名前需指明数据类型,支持以上数据类型,声明时可初始化,给变量初始化为表达式的值,否则默认空值。
4.36 虚拟示教器
插入ABB机器人后,即可打开虚拟示教器。示教器相关操作,请查看第六章虚拟示教器。